MODELLING OF STATIC RISER RESONSE
Background
As discussed above. the "influence coefficients" for the riser angle components play a key role in the dynamic positioning control angle. These coefficients are studied in the following. and the possibility of establishing simplified relations for these coefficients is also explored.
Riser Model Based on the Finite Element Method (FEN)
The differential equations governing the static and dynamic behaviour of the riser can in general not be solved exactly for arbitrary riser properties and arbitrary load patterns. Hence, numerical methods are required, with the Finite Element Method by far being the most applied one. The riser is then subdivided into into a number of such elements, and the accuracy of the computed response obviously depends on the number of elements. For further details on the theoretical basis of the FEM modelling, the reader is referred e.g. to Engseth et al (1988).
In order to limit computation time, it is of interest to minimize the number of finite elements which is applied for the riser model, while still maintaining a sufficient level of accuracy. In order to investigate this further, convergence studies were performed for a specific drilling riser configuration in deep water. The following data were employed: The water depth is 1000 m. The riser diameter is 0.5 m. the riser wall thickness is 0.025 m and the modulus of elasticity is E - 2.1E+5 MPa. The top tension is 2500 kN. and the tension of the lower part is 1200 kN. The current velocity is initially taken to be uniform with depth, with a constant velocity of 1 m/s. Variations of this profile are made in relation to the static response analysis below.
It was found that for the number of elements being equal to 10, the error as compared to a very fine discretization was less then 10%. Increasing the number elements to 50, the error was reduced to less than 1%. However. the computational effort is significantly increased, in particular if a static response analysis is performed at each time step of the analysis. For practical purposes, it seems that between 10 and 20 elements will be sufficient. Obviously. this observation can not be generalized to other riser configurations, current profiles or other response quantities than the riser angles (c. g. stresses). However, it is anticipated that for this particular type of response. the selected number of elements is indicative for what is to be expected also for other cases. Furthermore, the convergence rate was found to be rather independent of the vessel offset at the top of the riser.
Static Riser Response as a Function of Vessel Offset
The angular response components for a 2-dimensional (2D) riser profile are first computed by application of 100 elements. The current profile is now defined by the current velocity at mid-depth being 75%, and at the bottom 15%, of the surface velocity. It is observed that within the consiered offset range, the relations are close to linear for both the top and bottom angles. The curve designated by "FEMAP" corresponds to result obtained by utilizing a tailor-made program with just two finite elements. which is implemented in Maple. As observed, the agreement is surprisingly good. The linearity of the relations between the angles and the vessel offset is also confirmed for a number of other 2D current profiles, see Chen (2001).
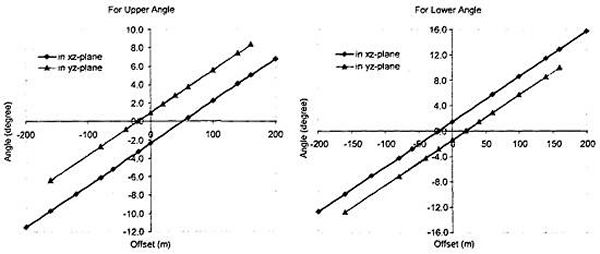
Turning to 3D current profiles, the same conclusion is made with respect to the X- and Y-components of the top and bottom riser angles when considered separately. This is shown in Figure 3 for the same riser configuration but with a twisted current profile where the direction of the current at the surface is along the global X-axis, while it is rotated by 180° degrees at the seabed.
For intermediate depths, a linear interpolation of direction is made. Ten different depth levels arc applied. The current velocity is constant and equal to 1m/s for the uppermost 500 meters. For the lowermost 200 meters it is also constant and equal to 0.5 m/s. Between 500 and 800 meters the velocity varies linearly.
It should be noted that if the separate X- and Y-components of the top and bottom angles are linear functions of depth, this does not apply to the resulting total angles. As these can be expressed as the square root of the sum of squares of the components, a highly nonlinear relation is obtained.
Regression Curves for the Relationship Between Vessel Offset and Riser Angles
The computed static response clearly suggests that linear relations provide very close approximations to the results obtained by application of a detailed finite element representation. This implies that the influence coefficients described above can be regarded as constants. This clearly also suggests that these coefficients can be computed a priors. i.e. outside the control loop. There is hence no need for a complete static response analysis at each time step. This will be discussed in more detail in connection with the control algorithm simulation below.
(拡大画面: 21 KB)
Figure 2. Top (left) and bottom (right) riser angle as functions of floater offset for example riser. 3-parameter 2D current profile. from Chen (2001).
(拡大画面: 22 KB)
Figure 3. X-and Y-components of upper (left) and lower (right) riser angle as functions of vessel offset for a 3D current profile with direction of velocity vector rotated by 180 degrees from top to bottom, Chen (2001)
EFFECT OF DYNAMIC LOW-FREQUENCY VESSEL MOTION
General
the possibility of significant dynamic amplification of the riser response due to LF motion of the surface floater need to be investigated. Even when control of the LF motion is performed, there will still be a remaining LF motion. If the control scheme is based on the measured ( or estimated) mean value of the riser response, such dynamic response components are not taken into account. If the additional dynamic response is significant, control schemes utilizing the mean value may not be adequate.
This topic is illustrated by considering the same example riser configuration as before. First the LF dynamic response is addressed, and subsequently the WF response.
Dynamic Response Amplification
The dynamic response due to LF excitation at the upper end is computed form the dynamic equilibrium equation on matrix form as obtained from the FEM mode. The drag damping due to the motion of the riser in the fluid increases quadratically with the relative response velocity (i.e. difference between the current velocity and the riser response velocity), hence tends to stabilize the maximum response levels.
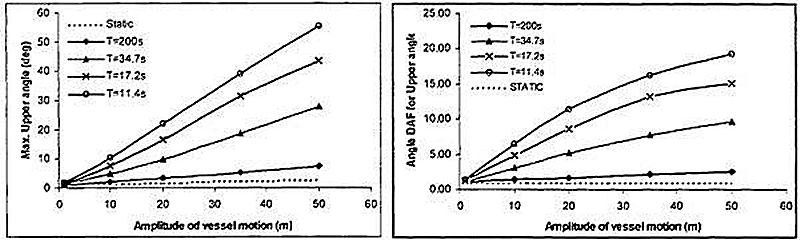
The riser angle response as a function of the amplitude of vessel motion is shown in Figures 4 and 5 for various motion periods. These periods range from 11.4 to 200 seconds. The two longest eigenperiods of the riser correspond to 17.2 and 34.7 seconds. Dynamic response from harmonic vessel motions at these periods has been calculated. The results in the Figure 4 are based on the same current profile as applied for the static results. In the figure, the maximum response measured in degrees is shown to the left, and the dynamic amplification factor (i.e. max dynamic angle divided by the static angle) to the right. Results for the top angle are shown in Figure 4, and for the bottom angle in Figure 5. It is seen that the dynamic amplification is much larger (as high as 15-20) for the upper than for the lower angle (maximum of 1.3). The small amplification for the latter is due to the significant hydrodynamic drag damping activated over the total length of the riser. Furthermore, the top angle response increases roughly linearly with the vessel amplitude within the interval which is considered. However, for the bottom angle the response seems to reach an asymptotic value.
The results shown in Figures 4 and 5 are quite representative for the dynamic amplification levels, while the shape of the curves may vary from case to case. This applies in particular to the bottom angle.
DYNAMIC WAVE-FREQUENCY RISER RESPONSE
General
The possibility of significant dynamic amplification of the WF response of the riser is also of central importance, since this response will always be present and adds to the total riser response. Furthermore, control of this response component is not performed at all due to the relative rapid variation with time.
Dynamic Response Amplification
For wave-induced response, the highest sea-states are not relevant since typically a disconnect is performed at some stage. The dynamic response for the top and bottom angles are computed as function of wave amplitudes ranging from 1 to 5 meters.
(拡大画面: 43 KB)
Figure 4. Dynamic response of riser top angle to low-frequency vessel motion. Response angle in degrees (left)and dynamic amplification factor (max dynamic/static) to the right. Chen (2001)
(拡大画面: 44 KB)
Figure 5. Dynamic response of riser top angle to low-frequency vessel motion. Response angle in degrees (left) and dynamic amplification factor (max dynamic/static) to the right, Chen (2001).
A single harmonic wave is applied, with a period coinciding with the second natural period of the riser, i. c. 11.4 seconds. The phase angle of the vessel motion relative to the wave is varied between 15 and 180 degrees. The dynamic amplification increases non-proportionally with the wave-amplitude. For the 5 meter wave amplitude, the dynamic amplification factor ranges from 1.8 to 2.7 for the top angle (depending on the vessel motion phase angle). This corresponds to angular response levels from 3.5 to 5.5 degrees. The corresponding values for the bottom angle dynamic amplification factor is from 1.02 to 1.05, i.c. significantly less than for the top angle. The response levels vary from I.95 to 2.I degrees.