(2)ソフトウェアの試作結果
ロバスト推定手法を用いて不良データの自動除去処理を行うソフトウェアの処理結果を示す。処理したマルチビーム測深データは、SeaBat9001とSeaBat8125により取得されたものである。これらのデータは、広島湾柱島南方付近を測量したものである。
処理データの概要を表28に示す。
表28. 処理データの概要
| 測深機 |
調査海域 |
測量日 |
| SeaBat9001 |
広島湾柱島南方 |
平成13年5月17日 |
| SeaBat8125 |
広島湾柱島南方 |
平成13年10月25日 |
ロバスト推定手法を用いて、水深データから、海底面を3次元空間における2次曲面方程式でモデル化し、測量した水深値とモデルによる水深値との残差の度数分布を作成した。
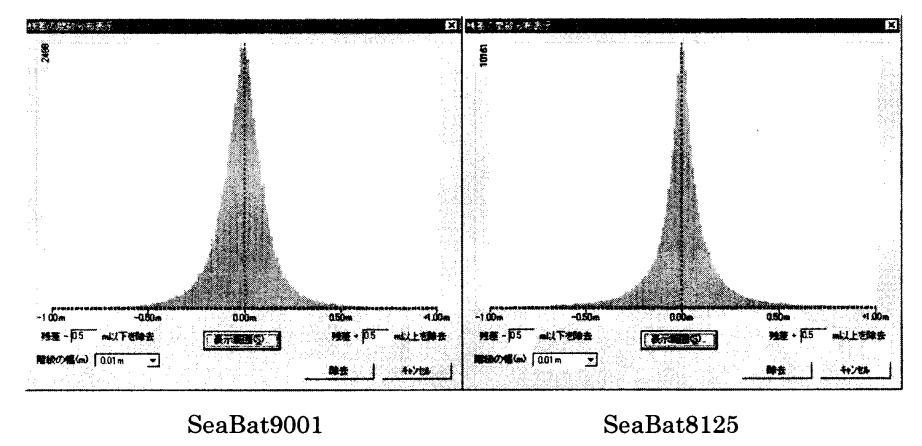
図63はSeaBat9001及びSeaBat8125による測深データの残差の度数分布図である。横軸は残差、縦軸は度数分布の階級の幅に入る水深データの数である。階級の幅は、0.01 mとした。ロバスト推定手法を用いてモデル化した海底面のセルサイズは、0.3秒である。
ここに示した残差の度数分布は、平均0の正規分布を形成している。これらの残差の度数分布図から、残差が±0.50m以上のデータを不良データとして、一括して除去した。
(拡大画面: 60 KB)
図63. 測深データの残差の度数分布図
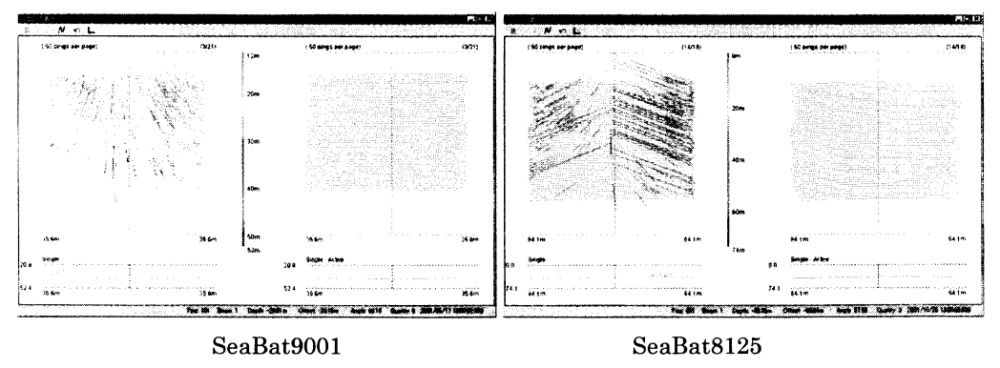
図64は、SeaBat9001及びSeaBat8125による測深データの処理結果である。これらのピングデータ表示画面は、左側が不良データを除去する前の原データ、右側が不良データを除去した後のデータを表している。左右の画面に表示したピング数は、50である。右側の不良データの除去処理結果から、左側の画面の存在するスパイク状の不良データが除去できている。
(拡大画面: 57 KB)
図64. 測深データの平坦地形部分におけるピングデータ表示
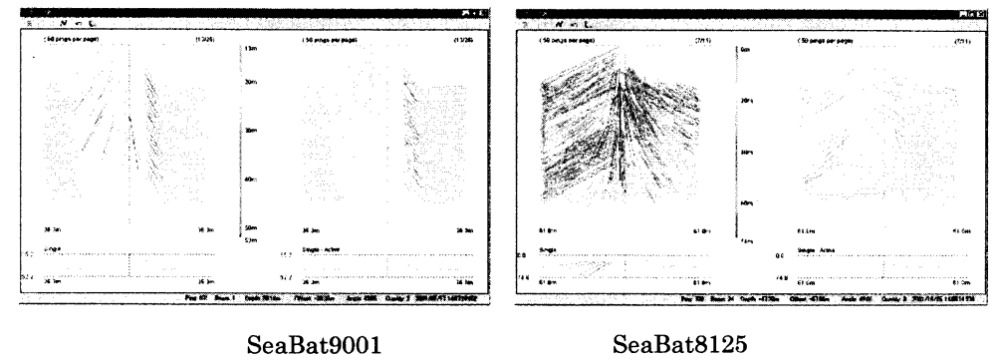
取得したデータのうち沈船部分における不良データの自動除去処理の結果を図65に示す。工作物である沈船の部分は、除去されずに残り、スパイク状の不良データが除去されている。
(拡大画面: 52 KB)
図65. 測深データの沈船部分におけるピングデータ表示
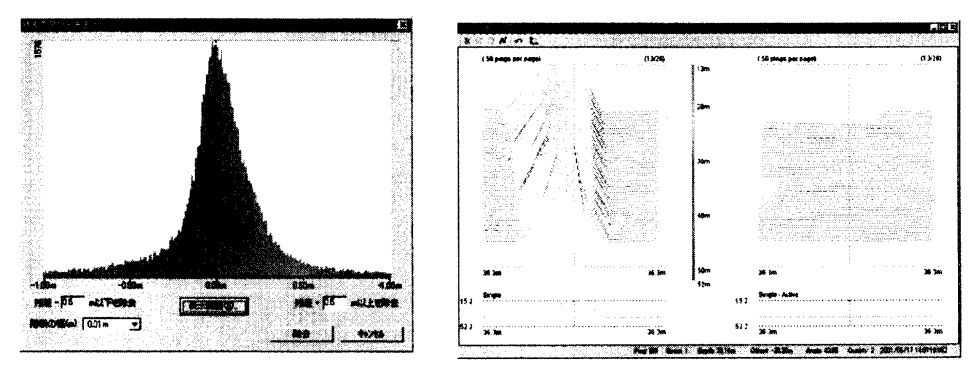
さらに、上記で使用したデータに対してセルサイズを4秒にしたときのSeaBat9001の測深データに対する残差の度数分布図とこれをもとに、残差が±0.50m以上のデータを除去した結果をを図66に示す。
(拡大画面: 67 KB)
図66. SeaBat9001による測深データの残差の度数分布図と測深データの沈船部分におけるビングデータ表示(セルサイズ=4秒、残差=±0-50m以上のデータを除去)
図63に対し、図66の方が残差の度数分布に広がりをもつ。これは、セルサイズを大きくしたため詳細な地形がモデル化できず測量した水深値とモデルによる水深値の差が大きくなってしまったためである。また、セルサイズを大きくしたため海底面の詳細なモデル化ができず沈船の部分が除去されている。
本ソフトウェアは、浅海用のマルチビーム測深データを処理対象とし、海底面をモデル化するセルサイズは、0.3秒を基準としている。深海用マルチビーム測深データに対しては、セルサイズの大きさを変更することで、不良データの自動除去をすることができる。また、水深10m以浅の調査海域を処理するときは、セルサイズを小さくして、海底面の詳細なモデル化を行い、不良データの自動除去処理をする。