3. 振動
3.1 固有振動
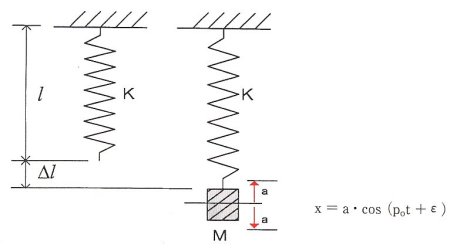
まず、質量M[kg]の余り大きくない重りを補・30図のように1本のばねで吊す場合を考える。そのばね定数をK[N/m]とする。Mには重力g[N/kg]が働くからMを吊すばねはMg[kg]の力で引っ張られて
だけ伸びた状態で釣り合う。ばねの力と重力の平衡状態である。このような平衡状態において、この重りMを手で少し引っ張って離すかあるいははじいてやって、その後はMが自由にふれるに任せたとする。Mは平衡点を中心に上下に規則正しくふれ続ける。ただしここでは一応Mは前後や左右には動かないように拘束されているものとする。この上下にふれる運動をもっと正確に表現すると、Mは平衡点から上方あるいは下方へそれぞれ距離aの所まで動いて一旦停止し、それから平衡点へ向かって戻り、それを通り過ぎて逆方向に距離aの所まで達し、再び平衡点へ向かって戻るという運動を繰り返す。この運動の様子を図表に示したのが補・31図の図表である。
補・30図 ばねKに吊られた質量M
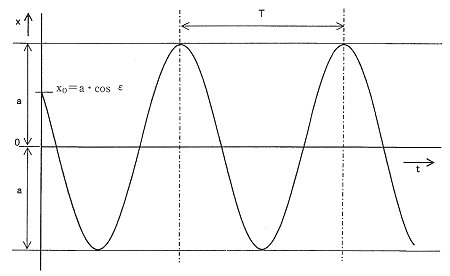
補・31図 x=a・cos(p0t+ε)
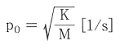
横軸のtは時間で縦軸xは重りMを代表する点。例えば重りMの重心の位置をその平衡状態の位置から測った距離で示したものである。ふつう変位と呼んでいる。xの正負は平衡点から上方に正、下方に負というようにとる。(この正負は便宜上のものであり、下方を正に上方を負にとっても構わない。)ここで考えたMとKが作る系の振動は平衡点をはさんで上下にゆれる。このように物体が平衡点のような基準とする位置を中心にその近くで行きつ戻りつするような運動を一般に振動という。後述するように我々の身のまわりにはいろんな形のもっと複雑な振動を生じているが、ここではこのばねに吊した重りの振動について基本的なことを考えよう。重りをはじくことにより生じたこの振動は時間がたてば振れ方が次第に小さくなり、遂には制止する。振動のふれが小さくなる現象は減衰と呼ばれている。これはこのばねの内部や支持点に働く摩擦あるいは空気との摩擦で振動のエネルギが失われるからである。しかしふつうこの種の摩擦の影響は余り大きくなく短時間の考察では減衰効果を無視できる場合が多い。ここでもこのような状態を仮定する。補・31図において平衡点からのふれa[m]を振幅Amplitude、2a[m]を全振幅という。そして運動の繰り返しに要する時間Tsを周期Period、その逆数f0=(1/T)[Hz}を振動数あるいは周波数(Frequency)という。振幅a[m]は、振動の持つ運動エネルギの大きさに対応している。すなわち始めにMを引っ張ったり、はじいたりしたときにこの系に与えられるエネルギでaの大きさが定まる。これに対してf[Hz]あるいはT[s]はこの系固有の値でa[m]の大きさに関係なく一定である。このMとKからなる系では
ただし
となる。系固有の値ということからこのf0の値はこの系の固有振動数と呼ばれる。この場合のMの動きは式で表現すると
となる。上式でεは位相Phaseと呼ばれ振動の測定をいつから始めるかで定まる。このような振動はあらゆる振動の中で最も基本的なもので、単振動力(調和振動)Simple Harmonic Motionと呼ばれる。この例のように一般に振動という現象は質量とその動きに対して平衡点へ引き戻そうとする力、すなわち復元力が働く構造から構成される系において発生する。ところでそのような系はわれわれの取り扱う機械やその付帯設備について無数に存在している。したがってそれらにおいては全く多種多様な振動が実際に発生する。それらの中で我々にとり最も重要なのはねじり振動Torsional Vibrationと横振動Lateral Vibrationである。
まずねじり振動について考えよう。
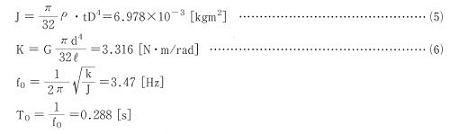
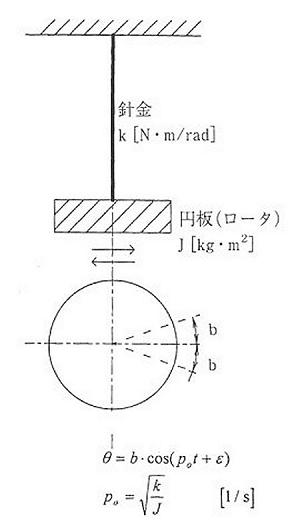
補・32図のように十分大きい円盤の中心に細い鋼線あるいは丸棒を取り付けこれをしっかりした天井に吊したとする。その円板を静止の状態から手で左右どちらかに静かに少しまわして、吊している鋼線にねじりを与えて放すと円板は左右にふれまわる振動すなわちねじり振動を生じる。この種の振動では円板が静止した状態からまわる角度を測ってふれを観測する。吊した円板の中心まわりの質量慣性モーメント(Moment of Inertia)をJkg・m12、吊している針金のねじり剛さをk[N・m/rad]とするとこの系の固有振動数は
となる。ここで数値例を示そう。円板が厚さt=18mm、直径D=150mmの軟鋼材とする。この円板を吊した針金は長さl=50cm、太さd=3.8mmφのピアノ線とする。ただし鋼の密度はρ=7.8×103kg/m3、横弾性係数はG=8.1×1010N/m2とする。
すなわち、この系は毎秒5.20回の割で左右にねじれる。この周期ならば当然肉眼でねじれる様子を認めることができる。ふつう我々が振動のふれ具合を肉眼で認めることができるのは高々lOHz程度までの振動であり、もっとも高い振動数となれば肉眼で振動していることを認識することは難しい。
補・32図
上の例は1枚の円板を鋼線で固定壁(ここでは天井)に取り付けた場合であったが、次にもっと現実的な例について考える。
補・33図のようにJ
1、J
2 2個のロータが細い軸でつながれているとする。そして軸受には摩擦がないものとする。この系にはJ
1とJ
2とが互いに反対方向にまわり、両者をつなぐ軸がねじれる振動を生じ得る。その固有振動数は
となる。次にもう少し複雑な3個のロータJ
1、J
2、J
3が
補・34図のようにk
12とk
23のねじり剛さをもつ軸でつながれている場合を考えよう。この場合には振動形態が二通りある。そなわち
補・34図(b)のように系各点のねじれ角の軸方向の分布が直線状になる場合と
補・34図(c)のようにその分布が山形になるものとが出てくる。そしてそれぞれの形の振動が生じる振動数は異なる。すなわち2つの相違な固有振動状態を持ち、それぞれの振動数に特有の振動形態すなわちモードModeを持つ。固有振動数の値そのものは円振動Pについての方程式
のふたつの解p1とp2をもとめると、
として与えられる。この二つの振動は同時にこの軸系に発生させることができる。したがってそのような場合の各ロータのねじれ具合は一見した場合、補・34図(b)、補・34図(c)のようなものではなく見掛け上はかなり複雑なものとなる。さらにこの例から判るようにもしN個のロータをそれぞれk12、k23……kN-1Nの剛さを持つN-1本の軸でつないだ系ならば1節からN-1節までの(N-1)個の振動モードを持ち、それぞれに対応する振動数をもつ。一般にねじり振動に限らずこのように多くの質量をもち、それに応じた数の固有振動モードを持つ系を多自由度系と呼んでいる。
さて今まで扱った振動系はいくつかの円板と単純な軸というように極めて単純な形で構成されているが、現実にはこのような都合のよい系は存在しない。まず始めの例のばねにはじまってロータをつなぐ軸まですべてそれら弾性要素自身の質量のことは考慮に入れていない。現実には質量のないものは無いから、上記のような議論は限界のあることで、最初の例の場合ならば物体の質量Mに比べてばねの質量が十分に小さい、円板やロータの場合もJ
1、J
2…に比べて針金あるいは軸自身の慣性モーメントが十分に小さいことが前提になる。しかしそのような前提は常に満足されるというわけにはいかない。例えば実際の軸が
補・35図(a)のような太いものであれば軸の慣性モーメントを適当な所に集中させる。例えばこの図に示すように軸上に適当な3点a、b、cを選び、そこに適当な割合で3分割した軸の慣性モーメントを集中させることにする。そうするとこれはもう5個の慣性モーメントをもつ系であり、4個の固有モードを持つことにする。問題はこのような方法で果たして実際の振動モードに近い答えが得られるかということが問題になる。難しい議論はあるが、一応適当な分割がなされていれば実際に近い答えが得られる。分割を細かくすれば、例えば、この例で軸を5分割すれば7個の慣性モーメント系となる。こうすれば前の3分割の場合よりもより実際に近い計算結果が得られる。この考えを押し進めると実在の振動系は無限のモード数、無限の振動数が得られることになる。しかし一般にはそこまでの分割をする必要はまずない。この例の軸の部分のようにどこといって特別に質量あるいは慣性モーメントが集中していないが、それ自身の質量を無視できない場合の系を分布定数系と呼ぶ。ただしこの分布定数系でも上の例のようにその系の特定の点に本来の集中質量をもつ場合が多い。これに対し、いくつかの個所に質量点あるいは慣性モーメントを集中させ、その間をばねのような復元力を与えるがそれ自身の質量を考えないというものでつながれた系を集中定数系と呼ぶ。