|
海洋構造物・支援船間の移動の為の可動式乗船装置に関する研究
正員 中村昌彦* 正員 梶原宏之**
|
* 九州大学応用力学研究所
** 九州大学大学院工学研究院
原稿受理 平成17年9月30日
|
Study on Automatic Position Adjustable Elevator for Workboat
by Masahiko Nakamura, Member
Hiroyuki Kajiwara, Member
Summary
The paper is concerned with an automatic position adjustable elevator to realize easy and safe passage between a workboat and a floating structure or an ocean platform. The elevator attached to the workboat is controlled to reduce the relative displacement between the workboat and the structures. The displacement is measured by image processing technique and is sent to the controller of the elevator. Model experiments were carried out to verify the performance of the system and successful results are shown. In addition, robustness of the image processing system is discussed.
1. 緒言
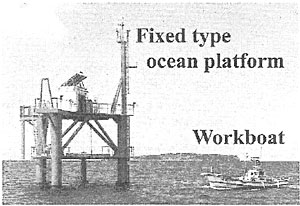
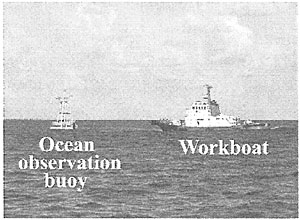
近年地球環境に関する研究が盛んになり、海洋観測に固定式ステーション(Fig. 1)1)、浮体式の海洋構造物・ブイシステム(Fig. 2)2)がますます盛んに使用されるようになってきた。これらの海洋観測用構造物の稼働率を維持し、且つ質の高いデータを得る為には定期的な保守が絶対不可欠であり、メンテナンスを欠くとデータの欠落を引き起こしかねない。ところが、有義波高がさほど大きくない波浪中においても支援船と構造物の間の相対上下変動が大きく、支援船・海洋構造物間の移動が困難になることはよく経験することである。また、保守作業開始時は海象が穏やかであっても、作業中に天候が悪化し、作業終了後、支援船への移動が非常に困難で危険になる場合もある。そこで、本研究は、海洋構造物・支援船間の相対(上下揺)変位に同調して動き、多少の波浪中でも安全な移動を確保することを目的とした可動式の乗船装置の開発を目指す。
岸壁に係船中の船への移動は船と岸壁間にわたされたスロープで行われ、船の上下変動に応じて傾斜が変わるため、一種の可動式乗船装置と言えるかもしれない。この方法は岸壁に係船された船の波周期での上下動は小さいこと、潮位変動による上下動は非常に周期が長く順定常とみなせることで安全性が確保されていると考えられる。従ってこの方法を波周期で大きく動揺する海洋構造物・支援船間に適用した場合、さまざまな不具合が生じると思われる。たとえば、(1)直接支援船からヒンジ付きのわたり板を海洋構造物に渡すことを考えると、上下方向変位によるわたり板の角度変化を少なくする為には突き出し量(わたり板の長さ)を大きくしなければならず、接舷が困難となる。(2)わたり板を支援船作業デッキ上に設置すれば接舷の問題はなくなるが、デッキスペースの減少を招く上、小さい船の場合は設置困難である。そこで、支援船後部に設置され上下方向に移動するエレベーター式の装置を提案する。相対変位については上下方向だけでなく、縦揺による水平方向の変位(隙間)も考慮しなければならないが(作業中は支援船を海洋構造物に押し付けるように操船するため、前後揺による水平方向の変位は無視できる。)、すべての相対変位をなくすためにエレベーターを垂直・水平方向に駆動することは機構を複雑にし、コストの上昇につながる。従って、水平方向についてはエレベーター端にヒンジ付きのわたり板(上下方向の相対変位が無くなれば突き出し量の小さいわたり板で十分と考えられる。)を設け、隙間を回避することにする。横揺によるねじれを如何に吸収するか等の問題については今後の課題として実用化に向けて検討を続けていきたい。
海洋構造物、支援船間の相対変位が最小になるように可動式乗船装置を制御するためにはその変位を計測しコントローラーに入力することが必要であるが、装置の汎用性を考えると、海洋構造物側に特別な位置計測用の装置を必要としないシステムが望ましい。よって、支援船に搭載されたCCDカメラにより撮られた海洋構造物の映像から画像処理により相対変位を得るシステムが実用的であると考えられる。また、画像処理と制御系を組み合わせたシステムはいろいろな分野で汎用的に利用可能である。システムの機能、性能を確認する為、水槽において模型実験が実施された。良好な結果が得られたので報告する。さらに画像処理の環境(明るさ)の変化に他するロバスト性についても検討が加えられた。
| Fig. 1 |
Photo of workboat and fixed type ocean platform |
| Fig. 2 |
Photo of workboat and ocean observation buoy |
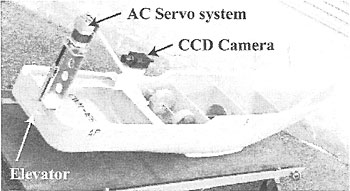
Fig. 3 Model of workboat
2. 支援船模型
実験には1/12スケールの模型船(長さ:1.65m、幅:0.364m、排水量:476.3N)(Fig. 3)が使用された。模型船には相対変位を計測するためのCCDカメラが搭載されている。模型実験で使用される相対変位を計測するための画像処理手法は修正することなく実機で使用可能である。可動式乗船装置の可動ストロークは15cm(実機で1.8m)であり、乗船装置はコンパクトにまとめられたACサーボシステムにより駆動される。一般的に海象が非常に悪い場合は作業が中止されるのであまり大きなストロークは必要ない。
3. 画像処理システムとコントロールシステムの構成
画像処理システムとコントロールシステムの構成をFig. 4に示す。カメラの画素数は659(h) x 494(v)で、計測範囲を1mとするとサブピクセル精度の画像処理を行うことにより0.1mm程度の分解能が期待できる。画像処理はパソコン(PC-1)にインストールされたソフトウェア(本研究ではMVTec社のHALCON)3)により行う。画像処理により得られたターゲットの位置情報等はD/A変換器でアナログ量に変換された後、波高計などのアナログセンサー出力と共にA/D変換され別のパソコン(PC-2)に収録される。PC-1で計算されたコントロール信号はD/A変換器でアナログ量に変換され可動式乗船装置を駆動する。実機の場合は画像処理と可動式乗船装置のコントロールを別のCPUで行うのが望ましいと考えられるが、模型実験ではCPUの処理能力に余裕があったので実験装置の簡素化のため1台のパソコンで処理した。また、実用化の際はノイズに対する安全性の為、信号のすべてをデジタル化することも必要であると考えている。
| Fig. 4 |
Block diagram of measuring and control system |
|