|
長大弾性管の渦励振とその再現性に関する研究
正員 千賀英敬* 正員 小寺山亘**
|
* 九州大学大学院総合理工学府
** 九州大学応用力学研究所
原稿受理 平成17年9月29日
|
A research on the Vortex Induced Vibration of a hanging flexible riser and its stability
by Hidetaka Senga, Member
Wataru Koterayama, Member
Summary
A numerical scheme was developed to simulate the Vortex Induced Vibration (VIV) of a flexible riser. To validate the accuracy of this numerical scheme, some experiments were carried out. In experiments, the top end of a hanging riser model was forced to oscillate periodically or irregularly in an uniform flow. The three-dimensional motion of the model was measured four times at every experimental condition in order to analyze and discuss the stability of the VIV. Good agreements between the amplitudes and frequencies of VIV are confirmed in those comparisons.
1. 緒言
海洋開発の分野において多くの用途で用いられる長大弾性管は、自身の長さが管の断面に対して非常に長く、その挙動は複雑となる。長大弾性管には重力、浮体から受ける反力、波・潮流等の流体力、流出する渦による流体力等多くの外力が作用する。特に長大弾性管から流出する渦は渦励振(Vortex induced vibration)と呼ばれる振動現象を引き起こす。
現在までに、渦励振に関する多くの実験・数値解析的な研究が成されてきた。近年の研究報告としてはBando et al.1)、Cheng et al.2)、Yamamoto et al.3)等が挙げられる。
上記以外にも渦励振に関する多くの有用な研究が成されてきた。しかし、実海域における掘削船は常に不規則波によって動揺しているにも関わらず、弾性管上端が不規則運動を行う場合の渦励振に関する実験・研究はあまり成されていない。弾性管上端が不規則運動を行う場合、弾性管から流出する渦は不規則に変化し、結果として自身の固有振動数との共振が生じにくく、複雑な運動となると考えられる。
著者らはこれまでの研究により、上端が正弦的運動を行う弾性管の3次元的挙動の数値解析プログラム4)を開発した。本研究において、そのプログラムを拡張し、上端が不規則運動を行う長大弾性管の3次元的挙動解析を可能とした。
さらに長大弾性管模型を用い、一様流中において弾性管上端の規則・不規則強制動揺実験を行った。模型上端に与える強制動揺運動は、弾性管を装備した浮体の波浪による水平方向運動を模擬している。渦励振は強非線形現象であり、弾性管上端に同じ強制動揺を与えた場合、同様の振動が再度生じるかという渦励振の再現性について議論する為、各条件での実験を4回づつ行った。
最後に数値計算結果と実験結果との比較を行い、本数値計算法の妥当性の検証を行った。
2. 模型実験
2.1 弾性管模型
本研究の主対象である弾性管の渦励振を正確に計測する為に、使用する弾性管模型はある程度の直径を必要とする。しかし、実験で使用する弾性管模型の縮尺を実機と揃える事は、実験水槽の深さが限られている為、非常に困難である。今回の実験に用いた弾性管模型(ポリエチレンとテフロン製)はTable 1に示される主要目のように非常に柔軟であるが、特定の実機を対象としたものではない。
Table 1: Characteristics of the riser model
| Model Length (m) |
6.5 |
| Outer Diameter (mm) |
22.5 |
| Inner Diameter (mm) |
12.7 |
| Mass per Lengh (kg/m) |
0.4 |
| Young's Modulus (MPa) |
8.847 |
| Bottom Weight in water (N) |
3.489 |
| Natural Frequencies of the model (rad/sec) |
1st |
0.571 |
| 2nd |
1.308 |
| 3rd |
2.207 |
| 4th |
2.732 |
|
Table 1に示す弾性管模型の固有振動数は、模型の曲げ剛性を無視し、張力のみを考慮した自由振動方程式を解く事により近似的に求めた5)。模型は中空である為、実験時に内部は水槽内の水で満たされている。
2.2 実験装置
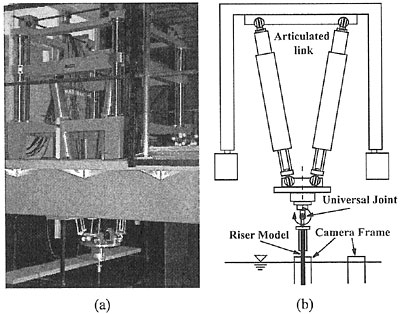
実験は九州大学応用力学研究所深海機器力学実験水槽(L×B×D: 65×5×7m)で行った。模型上端は、Fig. 1(a)に示すパラレルメカニズム型強制動揺装置6)にユニバーサルジョイントを用いてFig. 1(b)に示すように取り付けた。このジョイントにより、模型上端における境界条件は曲げモーメントを受け持たない単純支持である。
弾性管模型の3次元的な挙動は、翼型断面形状支柱内に納められた各5台のCCDカメラを用いて計測した(Fig. 2)。
| Fig. 1 |
Forced oscillator (a) and top end situation (b) |
Fig. 2 Overview of the measurement system
弾性管模型には、代表計測点A〜E、またその上下10cmの位置に計測の目印となる蛍光テープが貼られている。模型が弾性的である為、模型の初期形状を真直ぐに保つ事を目的とした錘を下端に取り付けた。従って、下端の境界条件は集中質量付きの自由端である。
実験時、模型上端から喫水までの距離は200mmであり、これは模型全長の約3%である。数値計算では、この喫水以上の部分には流体による抵抗が働かないとして考慮した。
以上の実験装置は曳航電車の上に載せられており、この曳航電車を等速で走らせる事により、一様流速U0を発生させる事が可能である。Fig. 2に示す通り、カメラを収めた支柱自身の渦励振による振動を防ぐ為に、支柱の断面は翼型である。実験時には、この支柱の下端に加速度計を取り付け、支柱自身の運動計測を行った。今回の実験条件での曳航速度範囲内において、加速度計による計測結果には機械的な高周波数成分のみが見られ、実験データの周波数帯における支柱の渦励振は計測されなかった。
2.3 実験条件
静水・一様流中において模型上端にX方向(inline)のみ規則・不規則運動を与える実験を行った。一様流速U0を発生させる実験では、一様流による模型の主方向変形及び渦励振が規則的になるまで時間をおき、その後上端に規則・不規則運動を与えた。不規則運動は、長大弾性管を装備した浮体の波浪による水平方向運動を想定し、その波浪データとして有義波高(Hx)と平均周期(Tx)で定義されるI.S.S.C.型スペクトラムを用いた。模型の運動は上端に規則・不規則運動を与え始めてから約3分間計測を行った。渦励振の再現性を検証する為、各実験条件で4回づつ計測を行った。予備実験として、一様流速U0のみを発生させた場合に発生する弾性管模型の渦励振も計測した。Table 2に示される全実験条件の中で、模型の相対的な移動速度より算出したReynolds数の最大値は約2.8x103であった。
Table 2: Experimental conditions
| Towing + regular or irregular oscillation |
| Amp. or Hx of top end motion |
Regular |
Irregular |
| 50 (mm) |
150 (mm) |
| Towing speed: U0 |
0.03 (m/s) |
0 (m/s) |
0.03 (m/s) |
| Period or Tx of top motion |
4.0 (s) |
Exp1〜4 |
Exp9〜12 |
Exp17〜20 |
| 6.0 (s) |
Exp5〜8 |
Exp13〜16 |
Exp21〜24 |
| |
| Towing |
| Towing speed: U0 |
0.02 (m/s) |
0.03 (m/s) |
0.04 (m/s) |
|
TExp1 |
TExp2 |
TExp3 |
|
3. 運動方程式と数値計算法
基礎となる運動方程式は‘Hamilton's principle’を用いて導出した7)。
弾性管の渦励振の数値計算を行う為に、本数値計算法では弾性管の主方向運動(X方向)により、弾性管から流出する渦により発生する揚力FL(z, t)をtransverse方向(Y方向)の運動方程式に外力として導入した。
ここで、
ρ: 流体密度
U(z): 弾性管の主運動方向移動速度
D: 弾性管外径
CLY: 揚力係数
ωs(z): 渦流出円振動数(rad/sec)
φ(z): 位相
t: 時間(sec)
である。本実験条件におけるReynolds数の範囲内において、Strouhal数(St)は約0.2であり、渦流出円振動数ωs(z)は(2)式のように表せる。
弾性管の主運動(X方向)の速度は時刻によって変化する為、本数値計算法において(1)式中のU(z)は弾性管の主運動方向速度の符号が同じである間の平均速度を用いた。また一様流速がある場合は弾性管の相対的な移動速度を用いた。
弾性管上端が運動する事により、弾性管の各位置は上端の運動に応じた振幅・位相で運動する。各深さ位置において流出する渦の位相φ(z)は、このような弾性管自身の複雑な運動や、それまでの流場等の影響を受ける為、決定する事は非常に困難である。
本数値計算法では、初期状態における流出渦の位相は模型上端から下端まで全てφ(z)=0とした。その後、各深さ位置における流出渦の位相φ(z)は、主運動方向が変わる時、その深さ位置で直前に流出した渦による揚力の強さに応じてφ(z)=0又はπとした。
Figs. 3に揚力の時系列の例を示す。同図aに示されるように、主運動方向が変わる時刻Pの直前に流出した渦による揚力が小さい場合、次に流出する渦は直前に流出した渦と同じ方向に流出するとし、位相は0とした。また時刻Pの直前に流出した渦による揚力が大きい場合、次に流出する渦は直前の渦と逆方向とし、位相はπとした(Fig. 3b)。
| Fig. 3 |
The phase of the next shedding vortex and lift force (solid line: total lift force, dots: prior vortex effect, thin solid line: next shedding vortex effect) |
揚力係数CLYは、渦励振による振幅Ayの関数でもある事は良く知られている。しかし、本手法では計算法の簡略化の為に各深さ位置における主運動方向の振幅から求めたKeulegan-Carpenter数のみの関数であるとし、小寺山8)による剛体円柱を用いた強制動揺実験の結果を用いた。
|