|
(v)船舶情報の抽出作業(第4処理段階)
次の処理では、先のマスキング処理作業(第2・第3の静止情報除去作業)により選出された海上エリアデータから、実際に海域を航行する船舶情報(位置情報・画素数情報)を抽出する。
(1)同一船舶の探索・判断処理方法
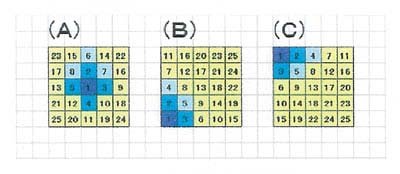
ここでは、同一船舶映像の探索・判断処理方法の具体的な計算方法について述べる。図1.2-7の(A)は、同一船舶映像内の探索・判断の処理順番のイメージを示したものである。今回の探索・判断方法では、最初に船舶映像であると認識し計算を始めた座標(番号1)を基準として、上下・左右一方向のグリッドの映像探索を行う。もしこのグリッドに船舶映像が存在した時は、同一船舶の新たな映像であるとして図に示すように新規番号(2・3・4・5)を割り当てる。
判断基準座標(番号1)の上下・左右全ての探索・判断が終了した場合は、次の判断基準となる座標(番号2)に移り、同様にして上下・左右一方向のグリッドの映像探索を行う。そして同じくこのグリッドに船舶映像が存在した時は、同一船舶の映像であるとして図に示すように新規番号(6・7・8)を割り当てる。以下同様の処理を船舶映像が存在するまで行う。
なお、実際の船舶映像の探索・判断では、レーダ画面内の原点座標(x座標:0、y座標:0)から順番に自動計算処理される事から、初期認識される基準座標が図1.2-7の(B)、(C)のように船舶映像の端部から始まるケースが殆どである。
図1.2-7 同一船舶画像の探索・判断の処理順番
(2)船舶情報(位置情報・画素数情報)の計算
先の探索・判断処理法により同一船舶の映像であれば、映像を構成する全てのグリッドのX座標、Y座標および、映像の合計画素数(グリッド数)を計算できる。
この各グリッドの座標データを用いて船舶映像内の重心座標を計算し、この座標を船舶の位置座標として保存する。これにより、各時刻におけるレーダ画面上の船舶映像から、船舶情報(位置情報・画素数情報)を抽出する事が可能となる。
図1.2-8 船舶映像内の重心位置
(3)船舶映像の輝度特性
図1.2-9は、同一時刻・同一場所における同一船舶のレーダ画面上での映像状態を、映像の輝度ごとに分けて表したイメージ図である。輝度値は0から255までの値をとり、輝度値が小さければ暗い映像を示し、輝度値が大きければ明るい映像を示す。イメージ図に示したように、船舶映像を探索する際、輝度値の下限値を高く設定(高輝度条件)すれば映像が小さくなり、下限値を低く設定(低輝度条件)すれば映像が大きくなる。
図1.2-9 船舶映像の輝度特性
(4)映像輝度の下限値設定
次に、船舶映像画素数を計算する際、映像輝度値の下限値をどのように設定するかについて述べる。先の(2)で示したように、探索・判断処理によって同一の船舶映像として抽出されたグリッドを合計する事により画素数を求める事ができる。しかし先の(3)で示したように、映像輝度の下限値設定により抽出される船舶映像の大きさが異なる事から、計算される画素数の大きさも異なってくる。
ここでは、船舶映像を抽出するのに適した輝度値の下限値を船舶映像の特性をもとに設定する事にする。主に輝度値を低く設定して映像を探索したケースと、高く設定して映像を探索したケースの映像特性をもとに設定値を決める。
(輝度の下限値を低く設定して船舶映像を探索した場合)
輝度の下限値を低く設定した場合、船舶映像の探索・判断処理では、船舶映像輪郭周辺の輝度値の低い(暗い)部分も拾ってしまうために大きな船舶映像となる。輝度値を低く設定した場合、本研究の対象海域となる東京湾では多くの船舶が輻輳しており、図1.2-10の(A)のように接近した船舶同士の映像では、2つの映像が重なる傾向が見られた。
この場合、船舶映像の重心座標は図に示すように1隻分の船舶としてしか計算されないので、(B)に示すように探索輝度値をある程度高く設定して2隻の船舶映像を分離する必要がある。
図1.2-10 輝度の下限値を低く設定した場合の船舶映像
(輝度の下限値を高く設定して船舶映像を探索した場合)
ここでは、輝度の下限値を高く設定した場合における船舶映像の特性について述べる。図1.2-11の(A)は、探索輝度の下限値を200以下(輝度値は0〜255までの値を取る)とした場合の船舶映像のイメージ図、(B)は探索輝度の下限値が200を超える場合の船舶映像のイメージ図を示したものである。
(A)の探索輝度の下限値が200以下の場合は、全体的に船舶映像の輪郭がしっかりしており、重心計算でも映像の中心をうまく取得できる。
しかし(B)の探索輝度の下限値が200を超える場合は、船舶映像内部に映像の欠損が見られ、重心計算でも映像の中心をうまく取得する事ができなかった。これは船舶映像内部に輝度値の低いグリッドが存在する事を示しており、必ずしも映像中心部ほど輝度値が高くなっていない事を表している。
輝度の下限値を低く設定したケースと高く設定したケースの2つの結果から、船舶の位置・画素数情報を抽出するに適した輝度の下限値を200と設定した。つまり、船舶の画素数情報は、船舶映像処理によって抽出された輝度値200以上のグリッドの合計数となる。
図1.2-11 輝度の下限値を高く設定した場合の船舶映像
(5)実際のレーダ画面上での船舶情報の抽出
ここでは、先に述べた映像処理方法を用いて、実際にレーダ画面上の船舶映像から船舶情報(位置情報・画素数情報)を抽出した例を示す。
図1.2-12は、実際に船舶映像の探索・判断処理にて取得された船舶情報(位置情報)の分布状態を示している。図は、海図情報(陸岸・航路・ブイ)を背景にレーダ画像を重畳表示して示している。静止情報の除去作業(第2処理段階)および、手動による静止情報の除去作業(第3処理段階)にて残された船舶映像の重心座標が取得されている事が分かる(取得された船舶映像の重心座標は、黒色の各船舶映像の中央部の白色の点で示されている)。
図1.2-13は、図1.2-12の探索・判断処理にて取得された船舶情報(位置情報)を示したものである。この図から、航路内を航行する船舶や、港の入り口付近に錨泊する船舶の分布状態を把握する事ができる。
図1.2-12 実際のレーダ画面上の船舶映像の重心座標
図1.2-13 レーダ画面から抽出された船舶位置分布
(vi)錨泊船舶の除去作業(第5処理段階)
ここでは、第4処理段階までに抽出された船舶情報(位置情報・画素数情報)のうち、トラッキング作業(航跡取得作業)に必要な航行船舶情報だけを選出し、トラッキング作業に必要のない錨泊船舶情報を取り除く。
マスキング作業の静止情報の除去作業(第2処理段階)では、全観測時間中(24時間)の半数にあたる50%以上(12時間)の時間、レーダ画面上に現われた映像を、静止情報(陸岸・ブイ等)として取り扱った。この作業によりレーダ画面上の殆どの静止情報を除去する事ができた。しかし12時間に満たない間だけ海上に錨泊する船舶のデータは、除去する事はできない。
そこで、ある時刻の船舶映像の重心位置を基準にして、その後10分間にわたる1分ごとのすべての船舶映像の重心位置が200m以上離れていない場合、その船舶は錨泊船であるとみなすことにした。
錨泊船舶除去の処理前と処理後の船舶の位置分布を、図1.2-14(処理前)と図1.2-15(処理後)に示す。これらの図から、処理前に存在していた錨泊船舶や海面反射等によるクラッターが、処理後にきれいに除去されている事が確認できる。
この除去作業は、一連のマスキング・船舶情報抽出作業の最終過程になり、ここで作成されたデータをもとにして次の自動トラッキング作業を進めていく。
図1.2-14 錨泊船舶除去前の船舶位置分布
図1.2-15 錨泊船舶除去後の船舶位置分布
|