|
5. 実験結果の考察と段差・隙間問題の解消に向けて
本研究は、できる限り大勢の移動制約者が自立して問題なく車両の乗降が可能となるホームと旅客用乗降口の段差と隙間はどのような値となるかを現状の技術的な制約条件にとらわれず検証することを目的として、段差・隙間を変化することのできる台座を作成した上で、車いす利用者、ロービジョン者の方たちを対象とした実験を実施することによって、ホーム幅と隙間との関係を考察したものである。本研究で得られた成果をもとに今後の段差・隙間問題を考察すると以下のようになる。
今回の実験結果に限って言えば、段差高50mm・隙間幅80mmについても、白杖でその存在が検知できれば、ロービジョン者にとって身体的な負担なく通過することができる。しかし、白杖を使わないロービジョン者もおり、完全を期すには車両乗降口の辺縁部の視認性を良くする必要がある。実際、ロービジョンの被験者P、Qさんはいずれも、今回の実験で使ったステンレス製の沓摺りの実物は、視覚だけでは検知しにくいとコメントしていた。
ロービジョン者のためには、車両乗降口沓摺り部分と周囲との色彩的なコントラストを強くすることによって検知しやすくする配慮も必要である。乗降口床面に視認性の良いテープを貼り付けることも考えられるが、乗降客によって頻繁に踏みつけられることによって、すぐに剥がれてしまうおそれがある。それに代わる方法として、乗降口の床面ではなくその直下外側部分に視認性の良いテープを貼り付けることが考えられる。あるいは、少しコストがかかるが、乗降口床面にLEDを埋め込んで光で視認性を向上させることも考えられる。
電動車いすで段差・隙間を越えようとする場合、その使用者は腕力を使うわけではないので、通過時の衝撃や転倒の不安など心理的な負担はあるものの、身体的な負担になることはない。電動車いすで段差・隙間を越えることができるか否かは、段差・隙間の大きさと電動車いすの重量、推進力など機械的性能によって決定される。
電動車いすは動力を使っているので、段差・隙間を通過する性能は高いと考えられるかもしれない。しかし、今回の検証実験の結果からは、電動車いすより胸髄損傷レベルの手動車いす使用者の方が段差・隙間通過能力はむしろ高いことが明らかになった。これは、胸髄損傷レベルの車いす使用者はウィリーして、キャスターで段差・隙間をクリアするのに対し、電動車いすの場合は、ウィリーできないので、前輪(普通型および簡易型の場合はキャスター)の径によって対応できる段差高・隙間幅が制限される。
今回の検証実験においては、前輪の径が最も大きいハンドル型電動車いすの場合、段差高30mmについては80mmまでの隙間すべてにおいて通過可能である。段差高40mmについては70mmまでの隙間まで通過可能であったが、隙間幅が80mmになると前輪の隙間への沈み込みにより有効段差高が大きくなり、前輪が段差に乗り上げることが不可能である。段差高が50mmになると、40mmまでの隙間幅しか通過できない。
ハンドル型電動車いすの次に大きい径の前輪(キャスター)をもつ普通型電動車いすの場合、段差高40mmまでについては、ハンドル型電動車いすと同様の性能であるが、段差高が50mmになると、隙間幅に関係なく通過不可能である。
電動車いすの範疇では前輪(キャスター)径が最も小さい簡易型電動車いすの場合、段差高20mmまではすべての隙間幅において通過可能であるが、段差高30mmにおいては隙間幅が80mmになると、前輪の隙間への沈み込み量が大きすぎて有効段差高が大きくなり、前輪で段差を乗り上げることができない。段差高が40mm以上になると、隙間幅に関係なく通過不可能である。
今回用いた簡易型電動車いすのキャスター径は呼び径6インチ(実寸160mm)であり比較的大きい。簡易型電動車いすは手動車いすをベースにしているので、最も一般的と思われる呼び径5インチ(実寸130mm程度)のキャスターを装備していることも多いと思われる。その場合、段差・隙間通過性能はさらに低くなる。こうしたことから、電動車いすに限って言えば、多くの使用者が他者の介助なしで鉄道車両に乗降できるようにするには、駅ホームと車両乗降口間の段差・隙間は大きくてもそれぞれ30mm・50mmくらいまでに抑えることが必要と思われる。
駆動力が同じでも、車いす・搭乗者の総重量が小さい方が段差・隙間を楽に通り抜けることができると考えられる。そこで、駆動力の代わりに3.5で記した総重量で除して正規化した駆動力を使う。
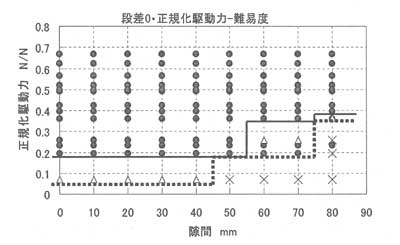
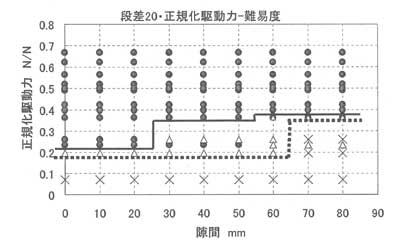
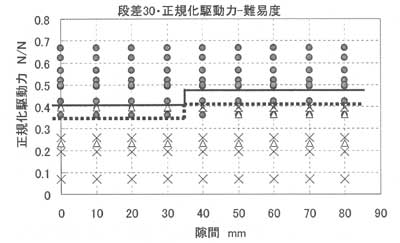
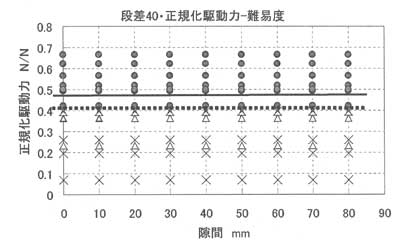
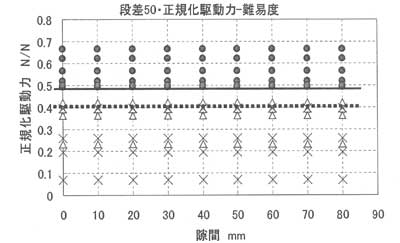
以下に、横軸を隙間幅、縦軸を正規化駆動力として通過難易度をプロットしたグラフを示す(図5-1〜5-8)。
図5-1 正規化駆動力と難易度(段差高0mm)
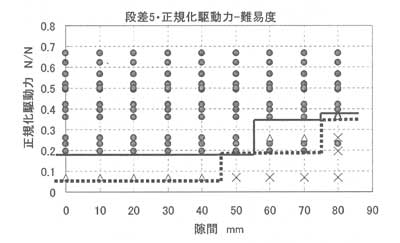
図5-2 正規化駆動力と難易度(段差高5mm)
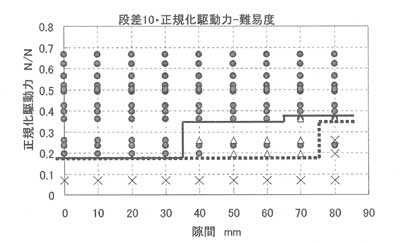
図5-3 正規化駆動力と難易度(段差高10mm)
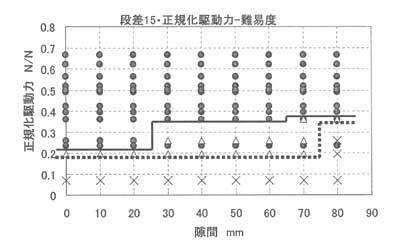
図5-4 正規化駆動力と難易度(段差高15mm)
図5-5 正規化駆動力と難易度(段差高20mm)
図5-6 正規化駆動力と難易度(段差高30mm)
図5-7 正規化駆動力と難易度(段差高40mm)
図5-8 正規化駆動力と難易度(段差高50mm)
図5-1と5-2から、正規化駆動力をスケールにして段差・隙間通過難易度をプロットすることによって、○、△、×の弁別は比較的良好になることが分かる。また、図5-1〜5-8の――は○だけが分布している領域限界、・・・は○と△が混在しているが×は含まれない領域限界を示すものである。つまり、各図において実線(――)より上方は楽に通過できる領域であり、破線(・・・)より上方は場合によっては楽ではないものの通過できる領域であることを示す。実線(――)より上方は実用領域、破線(・・・)より上方は許容領域とすることができる。
以上の結果から、手動車いす使用者の駆動力と総重量を計測することができれば、図5-1〜5-8を使って、対応できる段差・隙間を以下のように推定することができる。以下に段差高と隙間幅の組み合わせごとにいくつかの考察を行う。
(1)段差高0の場合は、隙間幅が0〜50mmまでは、正規化駆動力0.196以上が実用領域、隙間幅が60、70mmになると、正規化駆動力0.363以上が実用領域、隙間幅が80mmになると、正規化駆動力の実用領域は0.393以上となる。また、隙間幅0〜40mmまでは正規化駆動力が0.071以上あれば楽ではないが対応できる許容領域、隙間幅が50〜70mmになると、正規化駆動力0.196以上が許容領域、隙間幅が80mmになると、正規化駆動力0.363以上が許容領域となる。
(2)段差高5mmの場合は、実用領域および許容領域ともに段差高0の場合と同じである。
(3)段差高10mmの場合は、隙間幅0〜30mmまでは、正規化駆動力0.196以上が実用領域、隙間幅40〜60mmでは正規化駆動力0.363以上が実用領域、隙間幅70〜80のとき正規化駆動力0.393以上が実用領域である。また、隙間幅0〜70mmまでは正規化駆動力0.196以上が許容領域、隙間幅が80mmになると正規化駆動力0.393以上が許容領域となる。
(4)段差高15mmの場合は、隙間幅0〜20までは正規化駆動力0.26以上が実用領域、隙間幅30〜60mmでは正規化駆動力0.363以上が実用領域、隙間幅が70〜80になると実用的な正規化駆動力は0.397になる。また、許容領域については、段差高10mmの場合と同じである。
(5)段差高20mmの場合は、隙間幅0〜20mmまでは正規化駆動力0.26以上が実用領域、隙間幅30〜50mmでは正規化駆動力0.363以上が実用領域、隙間幅が60〜80mmになると実用的な正規化駆動力は0.393以上となる。また、隙間幅0〜60mmまでは正規化駆動力0.196以上が許容領域、隙間幅が70〜80mmになると正規化駆動力0.363以上が許容領域となる。
(6)段差高30mmの場合は、隙間幅0〜30mmまでは正規化駆動力0.424以上が実用領域、隙間幅が40〜80mmになると実用的な正規化駆動力は0.493以上となる。また、隙間幅0〜30mmまでは正規化駆動力0.363以上が許容領域、隙間幅が40〜80mmになると正規化駆動力0.424以上が許容領域となる。
(7)段差高40および50mmの場合は、すべての隙間幅について正規化駆動力0.493以上を実用領域、0.424以上を許容領域とすることができる。
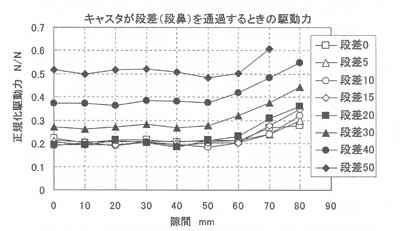
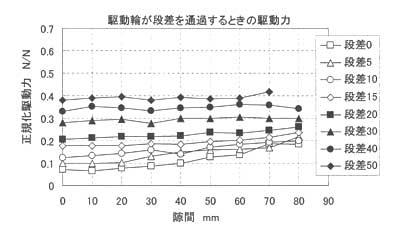
ここで、計測用車いすによる段差・隙間通過検証実験データから得られた駆動力ピーク値(図4-24、図4-25)を総重量で正規化した結果を図5-9、図5-10に示す。
|
図5-9
|
キャスタが段差・隙間を通過するのに必要な正規化駆動力
|
図5-10 駆動輪段差通過時正規化駆動力
|