|
6.5 Quantitative Analysis of Cooperation between Three Members
From the analysis in the last section, it is assumed that 3/O plays an important role in bridge team cooperation. We apply quantitative discourse analysis to understand the detail of the cooperation style.
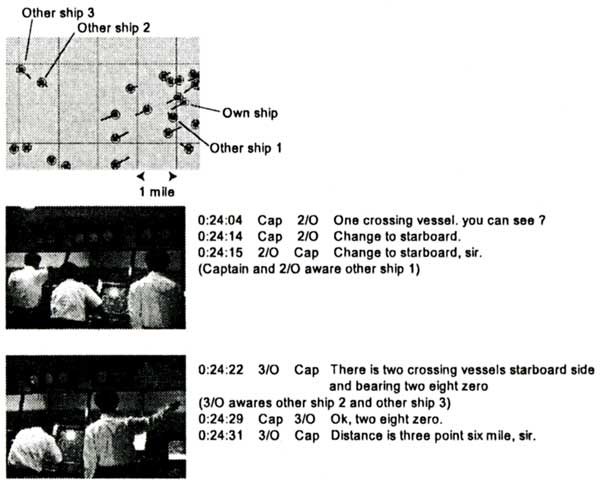
Fig. 15 shows an example of the cooperation that is conducted by three members. Firstly 2/O and Captain recognizes that a vessel at left has changed course. Since the vessel is close to the own ship, they pay much attention to it. 3/O understand their situation awareness status and tried to find other targets. 3/O realizes that there are two crossing vessels in 3 miles ahead and reports that to Captain.
We can interpret that the support by 3/O could be done from the following reasons. 3/O could realize the status of situation awareness of 2/O and Captain, since their conversations and gestures could be observed in open environment. 3/O owns the knowledge about lookout, which includes criticality measurements of another ship and operations of the instrument. By those openness and knowledge can make 3/O cooperate to 2/O and Captain.
Fig. 15 Collaboration between Captain, 2/O and 3/O
For understanding those kinds of cooperation, CORAS plays an important role that replay video and audio along with simulator logs.
6.6 Sequential Discourse Analysis
Fig. 16 shows time series transcript with exchange level structure. Boxes at right side indicate exchange structure and string in boxes are assigned codes. White color boxes relates to situation awareness. Light gray boxes relate to orders. Dark gray boxes are about feedbacks that correspond to previous orders. Arrows show relationship between orders and feedbacks. Open link shows that there doesn't exist a feedback to the order.
Fig.16 Time-series transcript with exchange level structure
From those time-series data, we can observe that several types of situation awareness are conducted recursively without any decision-makings or actions. Some team actions are processed in parallel. The last order does not have a feedback.
Fig. 17 shows a model of situation awareness, decision making, and action of bridge team. Situation awareness is recurring, decision makings are basically done by Captain and actions are processed sometimes in parallel.
Fig,17 Situation awareness, decision making and action model in the bridge
7. DISCUSSION
In this paper, we analyzed two training data that are recorded on CORAS (COllaboration Record and Analyze System).
By quantitative discourse analysis, we could find several characteristics in discourse.
・Most communications are occurred in situation awareness phase and action phase. Decision makings are done by Captain on his own.
・From communication flows, the clear organizational structure is observed. In most cases, communication occurs between Captain and another crew.
・Dynamic work delegation are occurred not by captain assignment but crews voluntary
・3/O plays a major role to support other crews and this is critical to respond dynamic change of workload or prevent errors.
From the qualitative analysis, how 3/O support the cooperation between Captain and 2/O is observed. Cooperation in open environment allows 3/O to realize the status of team situation awareness.
From the sequential discourse analysis, how team decision making are processed is observed.
・Several types of situation awareness occurs recursively
・Multiple team actions can be performed concurrently.
8. CONCLUSION
Finally we present following conclusions.
・Several types of discourse analysis are applied to understand crew interactions. Those methods shows their efficiency through case studies
・By using the result of discourse analysis and a team decision making model, patterns of bridge team cooperation are revealed.
・To support the discourse analysis, CORAS was implemented. CORAS shows its efficiency through several discourse analyses.
In our current approach, transcribing discourses and structuralizing them need a lot labors. We are currently researching to solve those issues by applying CSR (Continuous Speech Recognition) and machine learning techniques.
ACKNOWLEDGEMENT
We would like to express our gratitude to Mr. Tatsuya NOMURA, Japan Marine Science Inc. His ample experiences of working as an officer and as a trainer of BRM contributed a lot to this research. The Ministry of Culture, Education, Sports, Science and Technology, has provided financial support for the research under grant 14750724 and 12308017.
REFERENCES
[1] Mike Lynch, Focus Sheet: Bridge Resource Management Guide, Washington State Department of Ecology #99-1302, 1999
[2] Caroline E. Zsambok, Naturalistic Decision Making: Where Are We Now?, Naturalistic Decision Making, Lawrence Erlbaum Associations, Inc., pp3--16, 1997
[3] Mica R. Endsley, Theoretical Underpinnings of Situation Awareness: A Critical Review, SITUATION AWARENESS ANALYSIS AND MEASUREMENT, pp3--32, 2000
[4] Ed. Hutchins, The technology of team navigation, Intellectual Teamwork, Lawrence Erlbaum Associations, 1990
AUTHORS' BIOGRAPHY
Hideyuki ANDO is a research associate of the Department of Frontier Sciences, the University of Tokyo. He is interested in bringing computer-based intelligent systems to ship operation and engineering maintenance domain.
Dr. Hiroyuki YAMATO is a professor at the Department of Frontier Sciences, the University of Tokyo. His current research interests cover ship design support, logistics and application of intelligent systems in industries.
Dr. Takeo KOYAMA is a board member of Japan Marine Science (JMS), Inc and director of the research in JMS. He is also a professor emeritus of the University of Tokyo and former president of Society of Naval Architects of Japan.
Ryo KAKUTA is a master course student of the Department of Frontier Sciences, the University of Tokyo. He is interested in supporting bridge teams by applying speech recognition and artificial intelligence systems.
Hisanori NISHIDA has been a master course student of the Department of Frontier Sciences, the University of Tokyo until this spring. His research interests are in applications of Wearable Computer in industries.
Masakazu ENOMOTO is a technical official at Department of Engineering, the University of Tokyo. He developed the CORAS hardware to capture and replay cooperation data.
|