|
ENHANCING COMPETENCE BASED TRAINING AND ASSESSMENT FOR MARINE ENGINEERS THROUGH THE REALISM OF VIRTUAL PRESENTATION
Prof.Capt. Stephen J. Cross, Maritime Institute Willem Barentsz, Terschelling West, The Netherlands
Abstract: Over the past years the application and sophistication of maritime simulation has taken a great leap. Originating in the field of ship's bridge simulators, these systems have the longest history and subsequently the level sophistication here seems highest. Other systems of maritime simulation such as engine room, cargo handling and communication seem to have lagged behind in their development.
This is however not so much related to the realism and sophistication of the mathematical models used as well as to the presentation of the various components and items in the simulated environment. But the sophistication of the environment is definitely necessary in the context of the STCW95 requirements where the competences shall be demonstrated and assessed in a situation which is as realistic as possible.
1. APPLICATIONS OF MARITIME SIMULATION
In general it can be said that any dynamic process or complex operational equipment is suitable to stand model for a simulator system. Skills training, concept training and understanding of interactivity of systems can be achieved by proper use of qualitative simulator systems.
Some of the types of simulators in use in the maritime and related industries are mentioned hereafter. The list does not have the intention to be complete and new additions are developed regularly:
・navigation equipment simulator:
as stand alone or coupled to radar/navigation simulator various modern electronic navigation instruments training of operating procedures and accuracy theory,
・communication equipment simulator:
radio communication linked to bridge or standalone in full configuration fulfills GMDSS GOC requirements,
・radar simulator:
radar observer techniques can be trained basic ship control without outside view,
・radar navigation simulator:
on basis of radar simulator
navigating and sailing functions also simulated one or more bridges and possibly slaved bridges,
・shiphandling simulator:
all components of above mentioned plus visuals various types of internal and external effects full navigational instruments
・full mission shiphandling simulator:
as above but with full visuals up to 360 degrees interconnecting with other types of simulators sophisticated mathematical models possibly mounted on motion platform for special effects.
・fisheries simulator:
handling of fishing gear and ships equipment effectiveness of fishing operations can be reviewed.
・inland waterway ship simulator:
specific elements of river navigation included with or without visuals,
・dynamic positioning simulator:
complicated dynamic positioning operations are trained rather intensive operating procedures
specific types of DP equipment in use can be practiced,
・liquid cargo handling simulator:
originally oiltanker simulation
dynamic process of filling and emptying tanks cargo distribution and stability/stress charateristics especially complex vessels as gas, chemicals, products,
・ballast control simulator:
specially developed for ballast critical craft as oilrigs, offshoreconstruction ships,semi-submersible vessels etc. tilting platform essential for influence of operations,
・dredging ship simulator:
dredging master station simulated with all instruments dredging operations and results simulated and shown,
・propulsion plant simulator:
replica of engine control room
alarm and control panels as in engine room actual engine usually replaced by mimic consoles added noise to create lifelike operational influences can be coupled to bridge simulator,
・steam generation plant simulator:
stand alone or part of engineroom specific functions of steam equipment
・electrical power plant simulator:
stand alone or part of engineroom specific functions of electrical supply and use
・refrigeration plant simulator:
stand alone or part of engineroom
specific equipment and fysics to be simulated,
・oilspill management trainer:
logistics involved in oilspill recovery operations with environment database to be used for real spills
・vessel traffic management trainer:
as standalone or coupled to bridge simulator logistics and communication in vessel traffic,
・offshore process control simulator:
complicated layout of offshore processing unit trained sometimes more operators simultaneously working so procedures and communication skills to be practiced,
・drilling technology simulator:
various techniques required in drilling operations bottom characteristics are simulated,
Most of these listed simulator systems will usually consist of an interactive instructor station, student workplaces and sets of computers to communicate, calculate and present the environment.
Different solutions have been designed for the bridge simulators to create the effect of a realistic environment for the student workplaces. Usually this has resulted in a simulated ships bridge fitted with equipment and the outside view projected or shown on monitors or screens. Especially the outside view from the bridge offers a spectacular impression and often diverts the attention away from the installed equipment and the sophistication of the mathematical models.
Because of this effect the bridge simulators often seem to overshadow the other types of simulation systems especially the engine room simulators. Therefore the challenge seems to be how to create a realistic and at the same time impressive engine room environment for the trainees to perform in.
2. COMPETENCE BASED LEARNING AND ASSESSMENT
A new element brought to us by STCW 95 is the identification of learning objectives required to be met for various ranks, functions and subjects. Demonstrating one's competence can be done by approved simulator training where appropriate. How though this shall be achieved as well as what type of simulator is required to achieve demonstrating a certain competence are questions which will easily come to mind.
Hereby the classification of simulators drafted by IMSF and submitted to IMO for consideration in the revision of the STCW convention seems relevant and explained in relation to applications and the relevant learning objectives.
Standards of competence are by definition related to functions. The functional approach will now allow for competences be developed which can form a common basis for the certification of seafarers
There are two mayor types of competence based training, but both have the main goal to develop a competent workforce:
・in the UK competence means the expectations of employment and focuses on work roles rather than on jobs,
・in the US competence is a characteristic of a person which results in a good and effective performance in a job.
In a competence based training system the basis of the training design is explicit and has measurable standards of performance, This implies that assessment will form an essential part in a competence based system.
This in turn will require a high degree of QA to take place in order to check that the training and assessment are performed in a proper way.
When setting up a competence based system a number of steps are to be taken:
・standards of performance are to be distinguished
・identify the relevant competence based standards
・check these with the already applied practice
・where there are differences there is an apparent need
These competence based standards then form the framework for assessment. Evidence of・ performance will then be monitored and measured, possibly by means of before and after testing. Accreditation that all of your efforts are resulting in the right outcome is the final step.
Many aspects of maritime training using simulators are aimed at providing the trainee the possibility to acquire certain skills necessary to perform the task on board ship. The skills training should therefore lead to a certain level of competence related to the rank or function of the person on board. The achieved level of competence will be proven by a system of evaluation or assessment.
Competence based assessment techniques will have to be developed and applied for this purpose. A commonly accepted opinion hereby is that the best accepted evidence of the trainee reaching the level of competence will come from the actual workplace performance.
Actual workplace performance thus means onboard observations of how the trainee is performing. As no instrument is available to achieve such assessment the next best thing should be used. In our case this means an operational simulator system representing as closely as possible the real workplace.
3 REALISM OF TRAINING ENVIRONMENT
In any training programme the learning objectives should be clearly defined. In the case of maritime simulator training this is also required and presently often done in a structured manner. The level to which a certain objective can be achieved will depend on the training programme, training equipment, instructor ability and competence of the trainee.
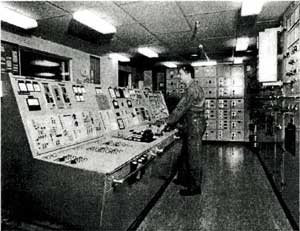
Fig. 1. Engine control room in real vessel
If functional understanding of a certain piece of equipment is the learning objective, the training tool will have to have as great as possible realism. If manoeuvering the vessel is the objective then either a real ship or a realistic simulator will be the required type of training tool. In the case of engineroom operations the procedures and location of the various components will be a main objective. The environment of a ships engineroom with the various controllers and operating equipment will have to be available for the trainee to demonstrate his competence.
Experienced trainees will have the ability to imagine that a less realistic presentation of a certain phenomena represents the real thing. Inexperienced trainees who have hardly or never operated the real equipment or been in the real environment will have a much harder time to transfer their learning impressions from the non-realistic training device to the realism of the ships environment.
The danger thus exists that a young cadet, having been extensive]y prepared for shipboard duties by means of e.g. pc simulation will search in vain on board for the pc to perform his routines. When the onboard equipment has a different format he will have a definite setback and need for adaption to the actual new and unfamiliar situation.
This aspect has clearly been identified by IMO and in the STCW95 the demonstration of the competences by simulator as required for certification shall be performed in a realistic as possible environment. Section A-1/12 states in the simulator performance standards that:
'the simulator shall be capable of simulating the operating capabilities of shipboard equipment concerned to a level of physical realism appropriate to the training and assessment objectives...'
4. ENGINEROOM SIMULATORS
Similar to most other simulator systems an engine room simulator consists of a number of modules connected together: instructor station, student workplaces such as the engine control room, the engine room and the sound and communication systems between all parts. The system can have a layout and instrumentation typical for a modern vessel and is normally arranged over three separate rooms; the engine control room, the engine room and the instructor station.
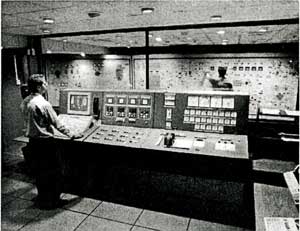
Fig. 2 Engine control room in simulated vessel
The control room is the heart of the ship, where the propulsion plant, auxiliary engines and subsystems are monitored, operated and prepared for work under different conditions, such as: port arrival/departure, loading and discharging, sea voyage. During each of these conditions a number of systems must be prepared and tuned to function properly. Economic and safe operation of the ship is based on reliable equipment and skilled engineers taking correct decisions at the right time. These simulations are partly made possible by a well-developed man-machine interface.
Features include vital components such as main engine remote control, engine-room local panels, controllers, engine telegraph, alarm systems, power supply switchboards, engine sounds etc.
Constructing a replica of the engine control room is the first area where effort has been placed by the simulator manufacturers. As the space, size and equipment is limited this has been achieved to realistic level.
As shown in the illustrations the operations taking place onboard the real vessel can be replicated and performed to a realistic level. This can include various types of training ranging from component training, to decision making training and engine room resource management roleplaying scenarios.
5. VIRTUAL ENVIRONMENT
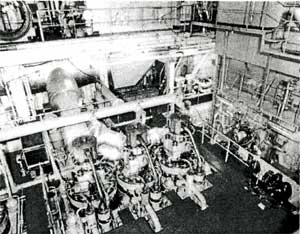
The next challenge is the representation of the actual engine room itself. Numerous tasks and functions have to be performed there by the duty engineer and thus the same tasks will have to be trained by the trainee engineer. But how one represents a full engine room in a simulated classroom environment is the question which now arises.
Fig 3. Real engine room
Various methods for presenting the engine room components are used in the present day engine room simulator systems:
・screen based workstations showing all the engine room subsystems on a single screen
・screen based workstations spread through the engine room space each representing selected subsystems at each position
・local operating panels being hardware controller boxes for each subsystem
・man size mimic diagrams boards, both active and passive showing all the subsystems in the engine room
・full size mock-up ship's engine, at selected points connected to the simulation models
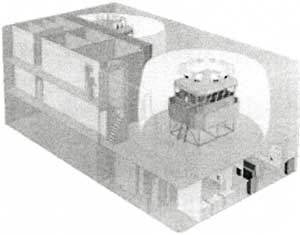
With the exception of the last indicated alternative, each of these systems has the disadvantage of the limitation of the realistic engineroom environment such as is encountered on board a real vessel. In order to compensate for this one of the latest developments is the presentation through projection of the engine room in a virtual manner on man size screens creating the impression of being inside the engine room. By means of a joystick type device it is possible to walk around in the engine room.
Fig. 4 Virtual engine room
Upon approaching a controller box which needs to be operated, a pointing device will allow communication between the buttons in this projected "hotspot" and the simulation model running on the simulator computers. In this way a virtual walk can be made through ail areas of the engine room, gauges can be inspected, controllers operated, levels checked and the trainee can return to the engine control room to further stand the watch as is required in the specific training scenario.
6. CONCLUSION
This projected engine room image has a number of characteristic advantages:
・the strong Impression created as in the bridge simulators due to the virtual graphics
・projected software is easy to change into other engine rooms
・unlimited size engine room interiors can be fitted in a minimal sized school room
・all functions available in local panel controller boxes can be represented
It is without doubt that these developments will add a whole new scope to the realism and attractiveness and subsequently to the learning results on the engine room simulators. Credit is herewith also given to the sophistication of the complex mathematical models which are at the core of the realistic engine room simulation by raising the level of the virtual presentation to the same high standard.
REFERENCES
Cross, S.J. (1998)
The functional approach to simulator classification
IMSF Annual General Meeting, Sydney, Launceston, Australia
Cross, S.J.(2002)
Course on modern technology use in assessment
METNET, EU Thematic Network, Terschelling
Cross, S.J. Olofsson, M. (2000)
Classification of maritime simulators, the final attempt,
Marsim 2000, Orlando USA.
Fletcher, S. (1992)
Competence Based Assessment Techniques
Kogan Page, London.
IMO, (1995),
Revised STCW Convention
IMO, London.
Muirhead, P.M .(2002)
Course on modern technology use in teaching
METNET, EU Thematic Network, Malmø.
Rowntree, D.(1997)
Assessing students: How shall we know them
Kogan Page, London.
Wolde, A.ten (1996)
Digital tools in professional training
Study Centre for Technology Trends, The Hague.
THE AUTHOR
Prof. Capt. Stephen J. Cross,
Maritime Institute Willem Barentsz
Dellewal 8, P.O.Box 26,
8880 AA Terschelling West
The Netherlands,
Tel: + 31 562 446600
Fax: + 31 562 446601
Email cross@mi.nhl.nl
AUTHOR'S BIOGRAPHY
After an operational seagoing career in the Dutch merchant and offshore construction fleets, Capt. Cross became qualified higher nautical education lecturer in the Netherlands. Simulator instructor, examiner of masters and mates, lecturer of maritime education and training at the World Maritime University were the next occupational stages. Then he was employed as Senior Advisor at Kongsberg Norcontrol Simulation and highly engaged in research projects, functional development of maritime simulator systems as we]1 as simulator instructor and assessor training on a worldwide basis. In 1999 he took up the position of Director at the Maritime Institute Willem Barentsz of the University of Professional Education Noordelijke Hogeschool Leeuwarden on Terschelling.
He is longstanding member of IMLA and IMSF, fellow of the Nautical Institute and member of a number of other maritime professional and educational organizations and societies worldwide.
|