|
4 PART TASK SIMULATORS AND CBT-TRAINING
4.1 General situation
The rapid developments on IT-sectors have made available PC based simulation systems of small size but large capabilities, comparable with the earlier full size simulators. This tendency has been clearly driving the role of part task training on various areas e,g. GMDSS, ECDIS, Manoeuvring and ship handling, navigation and collision avoidance and on others specific areas like cargo handling and liquid cargo simulation. Even 3-D modelling technology is already used as Virtual Engine Room model where you can "walkthrough" and operate components by mouse click[20].
This capabilities enable students even for long distant learning, but in general this technology calls for new elements of individual learning, training and self-assessment e.g. by automatic evaluation tools. Such single-task or part-task simulator activity could be monitored and recorded by the institution (or company training officer) in preparation for further advanced training on the simulators ashore.
Large full size simulation centres with growing complexity have their main advantages to combine all these part task elements together in one facility to provide the realistic environment and complexity for sophisticated individual students training (e.g. for one man bridge operation) and for team training. Two examples will be given here specifically representing simulation aspects which could be efficiently applied in PC simulators for pre-training both on shore and even for distant learning on board.
4.2 Safety and Security elements
Safety and security aspects are of growing importance and specifically addressed through the latest amendments to SOLAS.
Safety training has been an issue for CBT and simulation for a long time. The development of computer based learning, training and assessment tools was already performed in earlier EU research projects and has led to one of the CBT programs for long distant learning used on shore and on board.
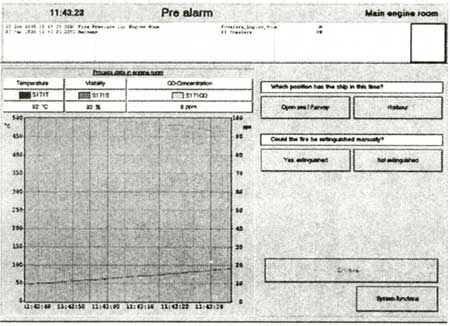
The development for fire fighting management system was one element of another EU Project DISC II [19]. One of the main results was the interfacing of this system into a global network with all other sensors and systems on board by new interface technology on high level architecture. This system was integrated into the Bridge simulator at MSCW and covers now elements for fighting of fire, water inrush, flooding and others. The instructor station therefore had to be completed with new functions to release and control these types of events which are mainly an element of bridge team training.
Figure 14 : |
Monitor for Emergency Management System on Bridge 1 of MSCW displaying alarms and parameters describing development of fire and advices/checklists for countermeasures |
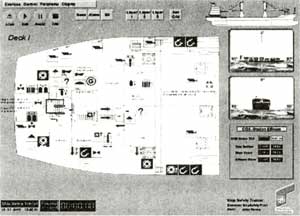
With the advent of ISPS Regulation the security issue was intensified within the education and training plans. And consequently another field was occupied by simulation technology through a new "Safety and Security Trainer"([16]): This simulator covers not only malfunctions and failures due to normal operation but also specific losses and breakdowns caused by terrorist's attacks by damages on purpose. Typical events could be: Water Inrush Caused by Damage to the Ship's Outer Plating, Broken Pipes and Fire Fighting with Foam, Water and CO2, Training for security plans and operations to search for intruders and others. By means of an Event Manager the instructor can configure the exercises for instance using the layout of the ships the deck plans where all safety and security items can be seen (Figure 15).
This simulator system is designed as an open system and can be extended to large systems or interfaced to other simulators. It could be a useful add-on to close the gap between Bridge simulation and Ship Engine room simulation.
Figure 15: |
Example of Deck view with Safety Equipment |
4.3 Ship handling training in PC simulators ashore - and on board?
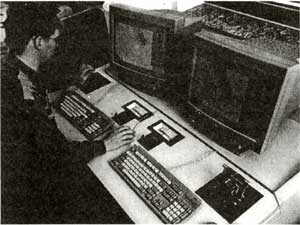
Many PC based simulation systems today, for example Transas, Marinesoft or Poseidon, come with very high levels of fidelity that allow meaningful training outcomes to be achieved with many operational functions and tasks. The workstations for ship handling training can be equipped with helm and engine controls (Figure 16). They allow for an effective pre-training as a preparatory measure to have some skills before entering more complex ship handling simulators and are wide spread in training institutes.
Figure 16: |
Computer Based Training station for navigation and manoeuvring at MSCW |
The same technology can allow much refresher and upgrading training to be carried out onboard, replacing courses delivered ashore. If broadband links are there, then the can be used in the field of simulation [3].
As a result of advancing broadband technology in the 21ST century, sophisticated simulation training programs will be capable of being accessed onboard via Web Education Management Systems (WEMS).
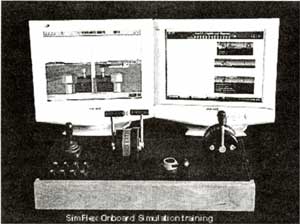
To illustrate the potential, A.P. Moeller, parent company of Maersk Line, fitted the DMI developed SIMFLEX onboard simulator to 16 of its ships in 2001-2002 (Figure 17). The system was developed to some extend under [15] and is being used to train cadets in rule of the road and general ship handling skills. A feature of the software is that the training can be supervised by an instructor ashore over a ship-shore communications link.
Figure 17: |
SIMFLEX onboard simulation training system |
Other simulation programs, such as 'PortSim' from SSPA could, for example, also be used onboard by officers to develop strategies for pilot boarding and port entry, as part of voyage planning processes. This modules close the loop to the on board voyage planning tools, incorporating also ship handling elements (e.g., as described in chapter 2.3,4).
The tendency of these developments described in this chapter brings together the capabilities of simulation for training and simulation for predictive analysis for the real ship handling. Both areas will benefit from improvements to develop
- more realistic math models for maritime simulation and
- advanced technologies to apply this simulation results.
The MARSIM conferences are an excellent podium to contribute to further achievements on this area.
5 ACKNOWLEDGEMENT
The author likes to thank colleagues from several training institutes and enterprises for their kind support and input for this paper, specifically those who are the authors of references [3], [4][3], [12], [16], [17] and [20][12].
6 REFERENCES
[1] Baldauf, M., Benedict, K., Böcker, Th., Felsenstein, C., Herzig, M. "COMPUTER-BASED SUPPORT FOR THE EVALUATION OF SHIP HANDLING SIMULATOR EXERCISE RESULTS", MARSIM 2003 Kanazawa, Japan, 2003
[2] Benedict, K. "INTEGRATED OPERATION OF BRIDGE-, ENGINE ROOM- AND VTS-SIMULATORS IN THE MARITIME SIMULATION CENTRE WARNEMÜNDE", Conference on Simulation CAORF / JSACC 2000, New York, 3-7 July 2000, Proceedings Vol. 1
[3] Hampel-Vogedes, B.: RESOLUTION IN COMPLEX PROJECTION SYSTEMS. 8. Workshop on Visual systems, November 2003, Bremen / Germany, to be published.
[4] Muirhead, P.: BROADBAND TECHNOLOGY AND MARINE SIMULATION: WHY NOT SIMULATOR TRAINING ANYWHERE, ANYTIME? ; MARSIM 2003 Kanazawa, Japan, 2003
[5] T. HARAGUCHI, T. NIMURA: A STUDY ON MANOEUVRABILITY STANDARDS FOR A SHIP WITH POD PROPULSION SYSTEM, MARSIM 2003 Kanazawa, Japan, 2003
[6] S. BUMAY: PREDICTION OF HYDRODYNAMIC FORCES ON PODDED PROPULSORS AND THE MANOEUVRING PERFORMANCE OF SHIPS WITH PODDED PROPULSION; MARSIM 2003 Kanazawa, Japan, 2003
[7] H. FREDERIC, D. BELLEVRE, P. PIERRE: PREDICTION OF MANOEUVRABILITY ON PODDED SHIPS; MARSIM 2003 Kanazawa, Japan, 2003
[8] K. NISHIMURA, T. HIRAYAMA MANEUVERING AND MOTION SIMULATION OF A SMALL VESSEL IN WAVES; MARSIM 2003 Kanazawa, Japan, 2003
[9] Z. AYAZ, D. VASSALOS: TOWARDS AN IMPROVED MATHEMATICAL MODEL FOR SHIP MANOUEVRING IN ASTERN SEAS; MARSIM 2003 Kanazawa, Japan, 2003
[10] J. ARTYSZUK: WAVE EFFECTS IN SHIP MANOEUVRING MOTION MM - A REVIEW ANALYSIS; MARSIM 2003 Kanazawa, Japan, 2003
[11]Y. YONG, J.Y. CHENG, R. H. XIANG: WAVE SIMULATION OF VISUAL SYSTEM IN MARINE SIMULATOR BASED ON WAVE SPECTRUMS; MARSIM 2003 Kanazawa, Japan, 2003
[12] Tessarzik, O.; Lange, R.: ASSESSMENT AND EVALUATION TECHNIQUES FOR SHIP ENGINE SIMULATOR SYSTEMS. Presented at METNET Workshop Warnemünde August 2002 and published in Final Report of EU Project METNET Task 8.5 Train the Trainer course for Ship Engine Simulator, Nov 2002
[13]Benedict, Knud; Baldauf, Michael: INVESTIGATION S INTO A METHOD FOR AUTOMATIC MANOEUVRlNG PLANNING. Proceedings Symposium "Integrated Ship Control" (ISIS), Deutsche Gesellschaft für Ortung und Navigation Hamburg 29. -30. Oct. 1996
[14] Kobayashi, H.: A STUDY OF SUPPORTING SYSTEM FOR BERTHlNG MANOEUVRE: Proceeding MARSIM Copenhagen, Sept. 1996
[15] MSCN/MARlN: SEAGULL (Seafarers Global Use of Long-distance Learning). EC Transport Project 4th Framework, WATERBORNE TRANSPORT, Project 6.4.4, Contr. No.: WA-97-SC.2059
[16] Oesterle, A.: SAFETY TRAINING BE MEANS OF SIMULATORS, Manuscript ICERS 6, Wuhan / P.R. China, Sept. 2003
[17] Staden, M.: HOW TO SIMULATE THE GAP BETWEEN REALITY AND HUMAN PERCEPTION OF 'REALITY' IN NAVIGATION AND SHIP HANDLING ENVIRONMENT. MARSIM 2003 Kanazawa, Japan, 2003
[18] Benedict, K.; Mueller, R.; Harre, I.: BAFEGIS - AN APPROACH FOR INCREASED RO/RO FERRY SAFETY; Proceedings of International Symposium Information on Ships (ISIS) DGON 22.-24.11. 1998
[19] DISC II: DEMONSTRATION OF ISC BY WAY OF INTER-EUROPEAN IMPLEMENTATION. EC Transport Project 4th Framework, WATERBORNE TRANSPORT, (Contract Number: WA-97-SC.2088)
[20] Kucharzewski, H.: MARINE VIRTUAL ASSISTANT - MaViAs. ICERS 5, Singapore June 2001
7 AUTHOR'S BIOGRAPHY
K. Benedict achieved his PhD's in Ship Dynamics and on Advisory Systems for Ship Operation. He is Professor/Senior Lecturer for Ship's theory and Vessel Traffic Technology and the Head of MSCW. Furthermore he is Visiting Professor at World Maritime University Malmoe for Marine Technology.
|