|
第2章 研究の内容
本調査研究は、従来の水路測量における潮高改正に代わり、測量船の高さをキネマティックGPS(K−GPS)の手法を用いて直接測定することにより、任意の位置の海図水深を効率的に得られる可能性を明らかにするとともに、マルチビームデジタル測深データ処理編集過程における誤差の判別及び不良データ除去等の課題を解決し、水路測量の効率化を図ることを目的とする。
そのために、潮高改正に必要な基本水準標及び関連する既存データの収集・解析を行い、最低水面(海図水深の基準面)の世界測地系に準拠した楕円体上の高さの分布を求めて最低水面モデルを開発し、高低マップの作成を行うとともに、測量船上において、K−GPSを用いた高精度測位実験を行い、その検証を行って測量船の高さ精度を明らかにする。さらに、マルチビームデジタル音響測深機データの解析精度を向上させる編集、処理技術の手法を研究開発する。
本年度は3年計画のうちの最終年次として前年度に引き続き下記の研究事項を実施した。
| 1. |
最低水面モデルの検証・評価 |
| 2. |
最低水面モデルによる潮高改正の可能性の評価 |
| 3. |
マルチビームデジタル音響測深機データの編集、処理技術の開発研究 |
海面の高さは、時刻の経過とともに潮汐、海流・気圧・風浪などの海象、気象現象、地盤の沈下等により常に変化している。水深を海図に記載するには、このように変化する海面からの実測水深ではなく、ある決まった特定の高さ(基準面)からの水深を記載することが社会的に決められている。この実測水深の海図水深への変換は、潮高改正と呼ばれ、浅く潮汐による潮位変化の大きい海域では特に重要である。このような水深の基準面は、定義を統一し混乱を回避する必要から、公式に決められたものを使用することが要請されている。海図水深の基準面は、厳密にいうと世界各国でその定義が異なっているが、基本的には船舶の安全のため天文潮の組み合わせによって起こりうる最低の面、あるいはほぼそれに近い面を用いる。最低水面は図1に示すように平均水面と関係づけられており、その差は、国際的略号であるZ 0で表記される。我が国では、現在は潮汐における主要4分潮の半潮差の振幅の和と定め、海域ごとにその値を求めて決められている。従って最低水面は地域により、必ずしも同じ高さではなく、その海域の平均水面と潮汐による潮位変化を計測して求めることが必要である。このような測定で求められた水深基準面を保持するために各地に基本水準標石や標識が設置されており、その標高とZ 0の値が海上保安庁のweb http://www1.kaiho.mlit.go.jp/ に「平均水面、最高水面及び最低水面一覧表」として記載されている。さらに、瀬戸内海等の潮汐の振幅の場所による変化の大きい海域では、便宜上の理由から、験潮所ごとに決定されるZ 0の適用範囲を表す区分帯を設定しO.1m単位でZ 0の値を定めている。この方法では、区分帯の境界において基準面に段差が生じている。 最低水面を決定するには少なくとも1年以上の潮位観測を行い、その結果から平均水面と潮汐の調和常数を求める。主要4分潮とは主太陰半日周期(Hm)、主太陽半日周期(Hs)、主太陰日周期(Ho)、日月合成日周期(H‘)の和であり
Z0=Hm+Hs+Ho+H‘
として表すことができる。「平均水面、最高水面及び最低水面一覧表」に記載されているZ0は基本的には1cm単位で表現されるが、瀬戸内海等においては上述のようにZ0区分帯を設け10cm単位で表現されている。これに対し、本研究では精度向上のためZ0について可能な限り高い精度を要求する。このために独自にZ0の分布を定めるが、このようなZ0は、もはや公式に決められるZ0とは別の物であるので、本文中では特に「精密」Z0として呼称する。本研究で追及するZ0の分布は、区分帯のないシームレスなものである。
さらに、本研究では、図1に示すように、水路測量における従来の基本水準標と最低水面の関係を、基本水準標をもとにした準拠楕円体と最低水面の関係に変え、最低水面を段差のないシームレスな面として、準拠楕円体を基準に決める。これにより、測量船のK−GPS測位で得られる海面の準拠楕円体からの高さを用いて、潮高改正を効率的に実施する方法を確立することを目指す。
| (拡大画面:4KB) |
 |
図1. 準拠楕円体と最低水面等の関係
Z0≒Hm+Hs+Ho+H‘
| 記号 |
名称 |
調査定数記号 |
| 半潮差 |
M2
S2
O1
K1 |
主太陰半日周期
主太陽半日周期
主太陰日周期
日月合成日周期 |
Hm
Hs
Ho
H‘ |
|
| (1): |
基本水準標下 |
| (2): |
精密基本水準標下 |
| (3): |
精密最低水面面−最低水面は測定値のまとめ方の違いによる精度の差。 |
2.1 最低水面モデルの検証・評価
昨年度までに実施した最低水面モデル開発のための情報収集及び開発結果をもとに、最低水面モデルの検証と評価を行うため下記の項目を実施した。
1)モデル検証のための測深作業及びデータ収集・整理
2)最低水面高低計算プログラムの修正
3)高低マップの作成
4)最低水面モデルの評価
2.1.1 モデル検証のための測深作業及びデータ収集・整理
最低水面モデルを検証するため以下のようにデータ収集・整理を実施した。
(1)K−GPSによる測量船の高さ測定およびデータの収集・整理:実験概要
(a)測量船への機器設置
K−GPSによる測量船の高さ測定およびデータの収集のための実験は、メインとなる海域作業および陸上作業に分かれる。このうち、海域作業は、第6管区海上保安本部の測量船「くるしま」を用いた。海上での測定の概要は次のとおりである。
表1 「くるしま」による燧灘実験の概要
| 実施機関 |
第六管区海上保安本部海洋情報部 |
| 測量船 |
くるしま |
| 収集データ |
K−GPSデータ
シングルビーム測深データ |
| 海域 |
(ア)今治東方燧灘付近東西側線約10マイル分が設定できる海域
(イ)今治港より宇品港 |
| 装置 |
TSS335B動揺センサー
POS/MV型インテグレーテッド慣性航法装置
精密音響測深機PDR-701
DGPS受信機
K-GPS移動点用用T5700GPS装置
K-GPS移動点/陸上点用4000SSE/SSIGPS装置 |
|
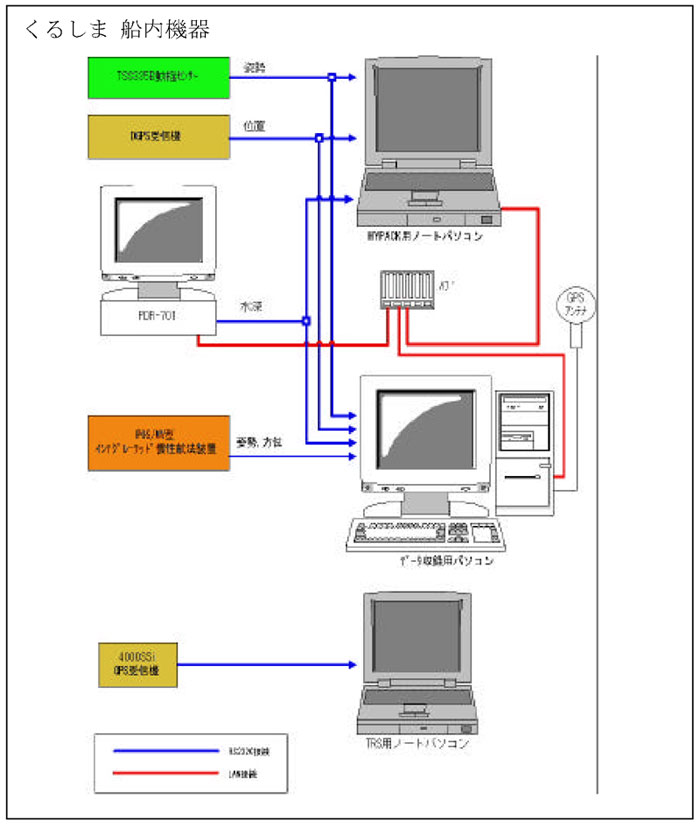
また、装置の船内配置は下図の通りである。
| (拡大画面:10KB) |
 |
図2 「くるしま」船内配置
(b)作業海域
作業海域の詳細は、以下のとおりである。
(ア)今治東方燧灘における海域
図6に示す下記の示す3点を結ぶ線上である。
A点:北緯34度5分、東経133度5分
B点:北緯34度5分、東経133度19分
C点:北緯34度9分、東経133度19分
図3 今治東方燧灘付近(海図番号W153による。)
(イ)今治港から宇品港までの海域
図7に示す今治港から宇品港までである。
図4 今治港より宇品港(海図番号W1108による。)
(c)作業日時
今治東方燧灘海域を平成14年10月10日に、今治港から宇品港までを平成14年10月11日に実施した。
(d)海上および陸上で収録されたデータの概要
(ア)今治東方燧灘海域
データ収録作業は、メインの「くるしま」船上に加え、今治港、魚島でも補助データの収録を実施した。これらのうち、魚島では、K−GPSの基準点として、測量船による測量実施時間を含む24時間のGPS観測及び副標による潮汐観測を実施した。さらに、今治港ではGPS観測および副標による潮汐観測を行った。「くるしま」船内機器接続状況を図5に、各場所における測定装置および取得データを表2に示す。
| (拡大画面:63KB) |
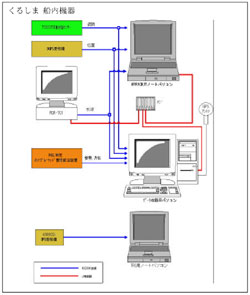 |
図5 燧灘実験でのデータ収録の概要
表2. 各作業場所における測定装置および取得データ
| 装置設置場所 |
測定装置 |
取得データ |
| 「くるしま」船内 |
TSS335B動揺センサー |
姿勢 |
POS/MV型インテグレーテッド
慣性航法装置 |
UTC、姿勢、方位 |
| 精密音響測深機PDR’701 |
測深 |
| DGPS受信機 |
測位 |
| K-GPS移動点 4000SSi |
測位 |
| 今治港 |
K-GPS陸上点 4000SSi |
測位 |
| 副標 |
潮汐 |
| 魚島 |
K-GPS陸上点 4000SSE |
測位 |
| 副漂 |
潮汐 |
|
「くるしま」の船上設置機材のうちRS232C出力のデータは、配線内で分配して収録した。また、HYPACK MAX用ノートパソコン、データ収録用パソコンおよびPDR−701は、LAN接続し、データ収録用パソコンに接続したGPSアンテナによるGPS観測により正しい時計を求め、3台のコンピュータの時刻をそれに一致させた。
(イ)今治港から宇品港までの海域
今治港から宇品港までの航行中において、K−GPSデータの収録を実施した。
測定装置および取得データを表3に示す。
表3. 測定装置および取得データ
| 測量場所 |
測定装置 |
取得データ |
| 「くるしま」船内 |
K-GPS移動点 4000SSE/SSI |
測位 |
|
|